Содержание
- 1 Выбор рамы для квадрокоптера
- 2 Выбор моторов для квадрокоптера
- 3 Выбор регулятора (ESC) для квадрокоптера
- 4 Выбор полетного контроллера для квадрокоптера
- 5 Выбор пульта управления (аппаратуры) для квадрокоптера
- 6 Выбор приемника квадрокоптера
- 7 Выбор аккумулятора для квадрокоптера
- 8 Сумка безопасности для литий-полимерного аккумулятора
- 9 Стяжки с липучкой
- 10 Пластиковые стяжки
- 11 Зарядное устройство для аккумулятора
- 12 Датчик температуры для зарядного устройства
- 13 Пропеллеры для квадрокоптера
- 14 Балансир для пропеллеров
- 15 Подвес для камеры
- 16 Пищалка для LiPo аккумулятора
- 17 Сервотестер
- 18 Провода и разъемы для квадрокоптера
- 19 Клей герметик для резьбовых соединений
- 20 Двухсторонний скотч 3М
- 21 Запасные гайки для моторов
- 22 Поисковая пищалка для квадрокоптера
- 23 Кабель USB Flight Simulator
- 24 Антивибрационная площадка
- 25 О коптерах и не только
- 26 Содержание
- 27 Что такое полетный контроллер?
- 28 Прошивки для ПК
- 29 Процессор (микроконтроллер)
- 30 UART (последовательные порты)
- 31 Гироскопы (Gyro), инерциальная навигация (IMU)
- 32 Встроенные функции
- 33 Формат крепежа
- 34 Прочие функции
- 35 Выбор полетного контроллера
- 36 История изменений
- 37 Выбираем полетный контроллер для квадрокоптера : 20 комментариев
Вы уже ознакомились с общими понятиями о полетных контроллерах. Теперь рассмотрим варианты полноценных полетных контроллеров с GPS, OSD, автопилотом способным вернуть коптер домой и другими функциями.
Сложный много модульный полетный контроллер способен превратить Ваш мультикоптер в беспилотный летательный аппарат.
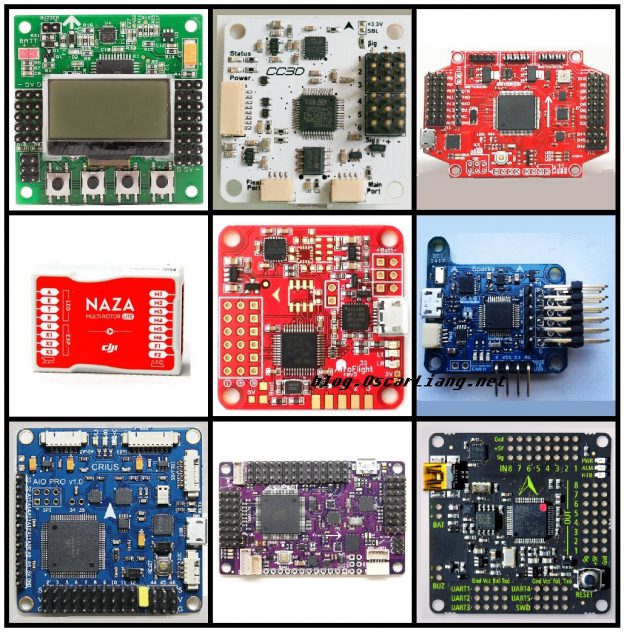
Ниже, в таблице, перечень самых популярных, полетных контроллеров.
| Наименование |




Сюда не включены FY-DoS, DJI A2, Zero Tech по причине высокой цены и низкой популярности. Для первого коптера лучше выбрать "что-нибудь" популярное и "по дешевле".
На сегодняшний день самые покупаемые контроллеры это DJI Naza-M Lite и APM ardupilot mega.
Популярность DJI Naza-M Lite обеспечена тем, что это фактически не Lite версия, а полноценная Naza M v2 в которой программно отключены все дополнительные функции. Т.е. Lite версия пере-прошивается в полноценную.
Достоинства Naza: оснащена 32 битным процессором STM32 позволяющий эффективнее использовать внутреннюю шину данных. Наза работает стабильнее и надежнее, проще в настройке.
Недостатки – это высокая цена самого контроллера и модулей, поэтому можно найти не мало материала в интернете о том, как установить дешевые модули.
APM – популярен своей доступностью по цене и широченным диапазоном возможностей. В отличии от назы APM оснащен всего лишь 8 битным процессором Atmel 2560, но разрядность процессора напрямую никак не отражается на поведении мультикоптера, а играет важную роль в развитии и модернизации полетного контроллера. Технически из за низкой разрядности (8 бит) шина данных, в которой передаются данные от датчиков, переполнена и на сегодняшний день APM 2.5 – 2.8 не может позволить себе развитие и расширение (т.е. новые прошивки). Последняя прошивка – это ArduCopter 3.2.1, все новые прошивки рассчитаны на 32 разрядного "брата" – Pixhawk.
Достоинства – дешевая цена контроллера и модулей. Модули:
– модуль питания (Power Module) передает данные об аккумуляторе – вольтаж, потребляемый ток, позволяет рассчитать длительность полета,

– GPS модуль используется в таких фукнциях, как авто полет по ранее заданным точкам, возврат домой, полностью автоматизированный полет от взлёта до посадки, удержание позиции – это возможность коптера оставаться на одном месте несмотря на ветер или другие факторы,
| Сторона с антенной | NEO-6M |
 |
 |
| LEA-6H | NEO-7M |
 |
 |
| GPS модуль в защитном пластиковом кейсе | |
 |
|
"Как выбрать" и "что необходимо знать о GPS" модулях. Существует несколько популярных моделей GPS модулей производителя ublox:
– NEO-6M – 11$, самый дешевый, популярный модуль, со скоростью обновления 5 Гц (5 раз в секунду)
– LEA-6H – 44$, отличается от NEO более высокой скоростью обновления данных 10Гц (10 раз в секунду), более точным позиционированием благодаря антенне большего размера и экранированию, которое делает модуль более тяжелым, но это того стоит,
– NEO-7M – 38$ это модуль нового поколения (по отношению к двум предыдущим), частота обновления 10 ГЦ для GPS, 1 ГЦ для ГЛОНАСС. Так же поддерживает QZSS и Galileo, но это не так важно, главное – это более стабильная работа, минимальное количство глитчей, более точное позиционирование,
– NEO-M8M – самый свежий модуль, 8го поколения, поддерживающий GPS, Uлонасс, Galileo, Beidou, QZSS и sbas
– OSD (on screen display) вывод телемерических данных (скорость, высота, заряд аккумулятора и д.р.) через канал видео передатчика FPV,

– Радиомодем (так же известно как радиомодуль APM, модуль радиотелеметрии) устройство для соединения полетного контроллера APM (или PIXHAWK), через Mission Planner, по радиоканалу. Работает на частоте 915 Мгц или 433Мгц.

К моменту выбора комплектующих у меня был нулевой запас знаний о квадрокоптерах. Я лишь посмотрел пару десятков роликов на Youtube и знал, что мне нужен квадрокоптер для съемок. Поэтому мне оставалось либо углубиться в теоретические знания, либо подсмотреть выбор у других любителей воздухоплавания. Я сделал то и другое.
Все покупки совершались на aliexpress во времена двойного кэшбека. Теперь халява закончилась и можно посмотреть в сторону других магазинов. Например – banggood.
Цены указаны по которым я покупал, возможно сейчас отличаются.
Выбор рамы для квадрокоптера
Для съемочного дрона необходима рама с форм-фактором 450 и выше. 450 – это размер между двигателями по диагонали. Самая популярная рама – F450.
Ее плюсы: дешевая (около 15$), легкая, проверенная, легко найти запчасти.
Но мой выбор пал на другую раму – S500. Во-первых, здесь чуть выше форм-фактор. Во-вторых, мне понравился внешний вид.

Такая рама мне обошлась в 30$. Запчасти на нее так же стоят в два раза дороже. Например, лучи обойдутся в 7,5$ за пару. Лучи для F450 обойдутся в два раза дешевле.
Цена: 30$
Выбор моторов для квадрокоптера
Поначалу думал, что выбор моторов будет сопряжен с массой расчетов. Но все оказалось намного проще. В документации на раму S500 есть ссылка на рекомендованные моторы:
- 2212 KV920
- 2216 KV880
- 2216 KV900
- 3108 KV900
Я выбрал самый бюджетный вариант – мотор 2212 KV920.

В маркировке двигателя есть два параметра. Первый определяет его геометрические размеры. Второй – мощность. 2212 – габаритные размеры статора: 22 мм – диаметр статора, 12 мм – его высота. Не путайте с размерами самого двигателя, они немного больше.
KV920 – характеризует мощность двигателя и его оборотистость. Чем ниже цифра, тем больше грузоподъемность и меньше скорость дрона. Если провести сравнение с машинами, то грузовики будут иметь KV от 200 до 900, а легковушки от 900 и выше.
Так же через KV можно сосчитать число оборотов на двигателе в зависимости от поданного на него напряжения.
Что касается моего выбора, то здесь решающую роль сыграл финансовый фактор. Обозначение «KV980» говорит хоть и не о грузовом происхождении двигателя, но все же о способности поднимать тяжести. Квадрокоптер с такими моторами вполне должен справиться с подъемом камеры типа GoPro и емкого аккумулятора.
Цена: 25$
Выбор регулятора (ESC) для квадрокоптера
Мотор меняет число оборотов в зависимости от поданного на него напряжения. ESC – устройство, которое отвечает за подачу и регулировку напряжения на моторе. Такое устройство называют регулятором, или в простонародье «регулем». Выглядит оно так:
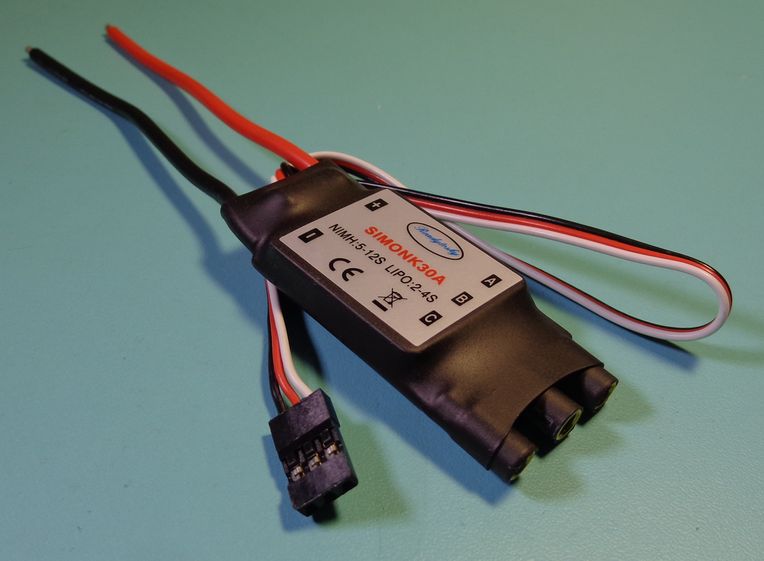
Два толстых провода, которые выходят из одного конца регулятора, соединяются напрямую к аккумулятору. Три провода с другого конца к мотору. Шлейф с цветными проводками идет к мозгу дрона (полетный контроллер), который и дает команды на требуемый уровень напряжения на моторах.
Выбор регулятора зависит от мотора. Есть два основных параметра для выбора: диапазон регулируемых напряжений, максимальный потребляемый мотором ток.
Понятно, что если мотор потребляет максимально 15 ампер, то регулятор следует выбирать с запасом в несколько ампер.
Например, мой мотор (Readytosky 2212 KV920) потребляет в районе 20А. Поэтому регулятор мне необходимо брать с характеристикой 20А и выше. Т.к. я закупаюсь в китайском магазине, где производители частенько преувеличивают возможности своих изделий, то мой выбор пал на регулятор с запасом – 30А.
Цена (за 4 шт.): 20$
Выбор полетного контроллера для квадрокоптера
Полетный контроллер – мозг квадрокоптера. Именно от этой штуки зависят полетные характеристики будущего летательного аппарата. Зависание в одной точке, управляемость, способность сопротивляться потокам ветра, полеты по координатам – вот небольшой, далеко не полный, список возможных функций контроллера.
Чем больше функций заложено в контроллер, тем выше его цена.
Самый популярной выбор – полетный контроллер Ardupilot mega, или, если сокращенно – APM. Ориентировочная цена – 45$. Его недостаток (для многих достоинство. ) – многочисленные настройки. Для того чтобы добиться достойных полетных характеристик будет необходимо постараться.
Я выбрал путь легче – контроллер Naza М Lite.

Этот контроллер способен выдать достойные полетные характеристики сразу из коробки, без каких либо долгих и изнурительных настроек. Цена его несколько выше, но это плата за комфорт.
Цена: 70$
Выбор пульта управления (аппаратуры) для квадрокоптера
Управление квадрокоптером осуществляется по радиоканалу, с помощью пульта. Передача команд от пульта к полетному контроллеру осуществляется через посредника (приемник). Приемник устанавливается на квадрокоптер и соединяется с полетным контроллером проводами.
Разбираться с настройками и характеристиками аппаратуры управления занятие сложное. Поэтому я положился на опыт предшественников и остановил свой выбор на аппаратуре Flysky FS-i6X 10CH. Эта аппаратура, по отзывам владельцев, является удачным выбором для начинающих пилотов.

Для меня очень важным параметром было присутствие 10 каналов передачи данных. Вообще, чем больше каналов, тем больше различных штуковин мы можем установить на коптер. Разъясню, чтобы было понятней…
На газ, поворот влево/вправо, крен влево/вправо, движение вверх/вниз необходимо 4-е канала, т.е. один канал на одно действие. Один канал нужен для переключения полетных режимов. Получаем 5 каналов – минимальный лимит на аппаратуру для квадрокоптера.
Т.к. я собираю коптер для съемок, мне будет необходим подвес для ориентации камеры. С помощью подвеса я смогу направлять камеру вверх/вниз и вправо/влево. На это мне понадобится еще два канала.
Итого, уже сейчас, я получил необходимость в семи каналах на пульте управления. Далее эти потребности будут только расти.
Цена: см.приемник
Выбор приемника квадрокоптера
Мой выбор пал на FlyskyFS-IA10B. Приемник имеет 10 каналов и способен задействовать аппаратуру по полной.
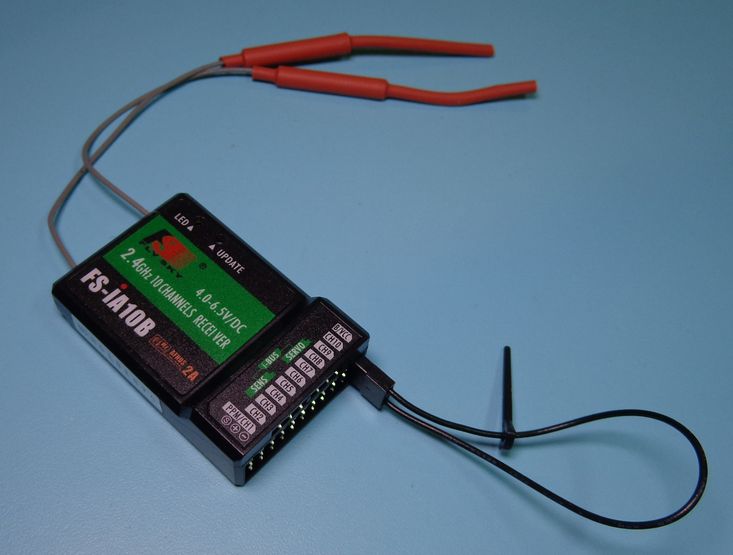
Для тех, кто так же впервые собирает квадрокоптер, хочу пояснить, что очень важно соблюсти совместимость устройств между собой. Так, приемник должен быть совместим с передатчиком (пульт управления) и полетным контроллером. Существуют различные интерфейсы связи для сопряжения этих устройств между собой. Так вот, выбирайте устройство так, чтобы их интерфейсы связи совпадали.
Цена (приемник + аппаратура): 60$
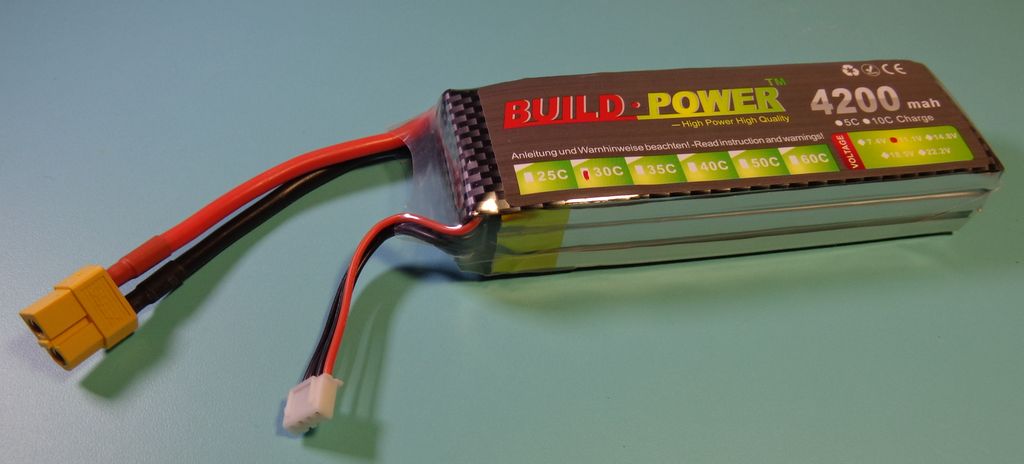
Выбор аккумулятора для квадрокоптера
Для квадрокоптеров используют литий-полимерные аккумуляторы. Такие элементы питания способны на большую токоотдачу, что очень важно для энергоемких устройств.
Одна батарея литий-полимерного аккумулятора дает (в номинале) напряжение в 3.7 вольта. Для того чтобы повысить напряжение на аккумуляторе, их изготавливают сразу из нескольких батарей (банок).
Чем больше банок на аккумуляторе, тем мощнее будет коптер. Все нахваливают четырехбаночные аккумуляторы, но цена на них очень высока. Я остановил свой выбор на 3S аккумуляторе емкостью 5500мАч и 4200мАч.
Цена 5500мАч: 35$
Цена 4200мАч: 22$
Сумка безопасности для литий-полимерного аккумулятора
В инете полно видео с воспламеняющимися литий-полимерными аккумуляторами. Я рисковать не стал и приобрел специальную сумку для хранения и зарядки LiPo батарей.

Цена: 4.2$
Стяжки с липучкой
Такими стяжками очень удобно фиксировать аккумулятор на квадрокоптере. Легко снять, легко поставить.

Цена (10 шт.): 1.8$
Пластиковые стяжки
Пластиковая стяжка + двусторонний скотч + изолента – основные крепежные изделия для фиксации элементов на раме.

Цена: 1$
Зарядное устройство для аккумулятора
Это устройство, на котором очень хотелось сэкономить. Но литий-полимерные аккумуляторы оказались очень капризными. Поэтому пришлось покупать хорошее, многофункциональное устройство. Мой выбор пал на китайский IMAX B6 mini.

Цена: 30$
Датчик температуры для зарядного устройства
Зарядка литий-полимерных батарей связанна с опасностью. В частности, такие аккумуляторы могут воспламениться при наборе заряда. Чтобы оградить себя от этого, я приобрел датчик температуры к своему зарядному устройству.
Цена: 5$
Пропеллеры для квадрокоптера
Пропеллеры – расходный материал. Мой первый полет чудом закончился без поломки винтов. Второй полет начал отчет сломанным лопастям. Поэтому этот компонент нужно приобретать с запасом.
Я выбрал вот такие:

Как только научусь летать, приобрету карбоновые пропеллеры, а для начала хватит и пластиковых.
Цена (комплект 5 пар): 5,5$
Балансир для пропеллеров
Замечали, что при съемке с квадрокоптера частенько возникает эффект «желе». Смотрится такое видео, прямо сказать, не очень. Такой эффект возникает из-за вибраций дрона, чтобы его нейтрализовать необходимо балансировать пропеллеры.
Я купил для этих целей такое устройство:

Цена: 3,5$
Подвес для камеры
Для того чтобы мои видеоролики, снятые с коптера, получились хорошего качества, мне пришлось приобрести специальный подвес. Он представляет собой систему моторов расположенных в трех осях. Такая конструкция позволяет сделать картинку плавной, без рывков и тряски.
Мой выбор пал на подвес HAKRC Storm 32. По отзывам пользователей, он может работать сразу из коробки.

Цена: 54$
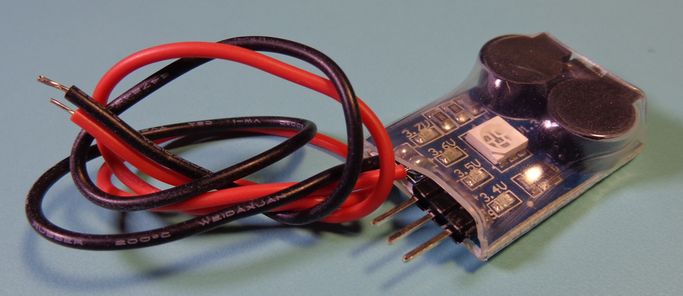
Пищалка для LiPo аккумулятора
Как уже писал выше, литий-полимерные батареи очень капризны. Если разрядить такой аккумулятор нижи трех вольт на банку – он выходит из строя. Пищалка оповестит вас о критическом уровне заряда на батарее.
На Али нашел два типа пищалок. Одина в пластмассовом корпусе, другая в термоусадке. Себе выбрал такую:

Цена:1.8$
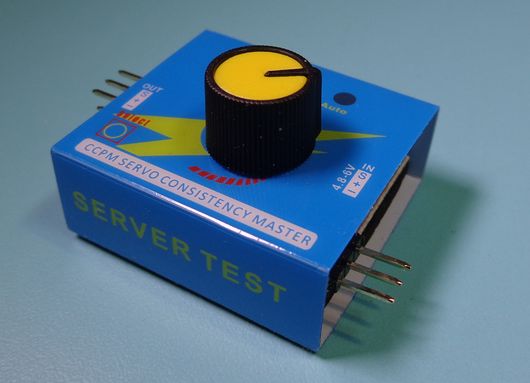
Сервотестер
Это устройство служит для тестирования моторов после покупки. Как оказалось, пульт и передатчик могут заменить такое устройство. Если вы решите в дальнейшем заняться моделями всерьез, то такое устройство лишним не будет, а так – пустая трата денег.
Цена: 3,5$
Провода и разъемы для квадрокоптера

Разъемы XT60 (10 шт. мама-папа) – 2,2$.

Разъемы JST (10 шт. мама-папа) – 1,3$.

Dupont кабеля для arduino – 3$.
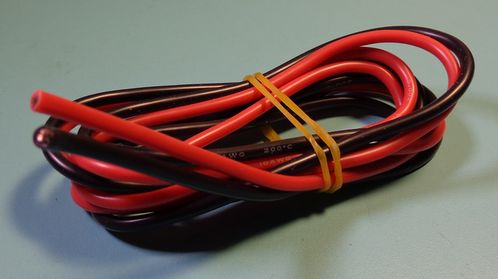
Силиконовый провод для соединения электроники – 2,5$.
Клей герметик для резьбовых соединений
Стопорная смазка нужна для того чтобы в полете не раскрутились винты. Мой выбор пал на эту жидкость:

Цена: 1$
Двухсторонний скотч 3М
Многие элементы квадрокоптера удобно ставить на двухсторонний скотч. Брать нужно качественный скотч, иначе рискуем потерять что-нибудь в полете.
Цена: 2$
Запасные гайки для моторов
Гайку с левой резьбой просто так в магазине не купишь. Поэтому потерянная гайка может обернуться месячным простоем в полетах (посылка столько идет). Не буду испытывать судьбу и закажу гайки заранее.
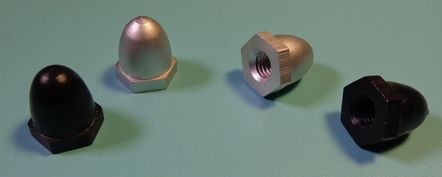
Цена (комплект 4 гайки): 3$
Поисковая пищалка для квадрокоптера
Если мой квадрокоптер упадет в траву, мне не придется его долго искать. Я щелкну на пульте тумблером, и активируется поисковая пищалка, которая поможет отыскать коптер.
Цена: 4.7$
Кабель USB Flight Simulator
Для того чтобы научится управлять дроном, совсем не обязательно его иметь. Можно установить на компьютер специальную программу и оттачивать свои навыки там. Для соединения аппаратуры управления с компьютером нужен специальный кабель.
Антивибрационная площадка
Такая площадка нужна для гашения вибраций. Обычно ее ставят под полетный контроллер. Мой полетный контроллер уже оснащен виброизоляцией, поэтому эту вещь я купил зря.

Цена: 3$
На этом пока все. Если что-то еще прикуплю, то постараюсь дополнить список.
О коптерах и не только
Количество полетных контроллеров, имеющихся в продаже может смутить новичка. Цель этой статьи — показать каким образом можно выбрать полетный контроллер для вашего коптера.
Если вы только начинаете летать, тогда не забудьте прочесть руководство для начинающих пилотов гоночных коптеров.
Содержание
Что такое полетный контроллер?
Полетный контроллер (ПК, flight controller, FC) — это мозг летательного аппарата. По сути, это схема, которая собирает данные с датчиков и команды от пользователя и делает некоторые изменения в скорости вращения моторов для того, чтобы коптер оставался в воздухе.
У всех ПК имеется базовый набор датчиков: гироскопы (Gyro) и акселерометры (acc); некоторые продвинутые конфигурации имеют также барометр и магнетометр (компас).
ПК — это также точка подключения всей прочей периферии типа GPS, светодиодов, сонаров и т.д.
Контроллеры для гоночных дронов очень быстро эволюционируют: становятся меньше, имеют всё более быстрые процессоры, более современные датчики и всё больше встроенных функций.
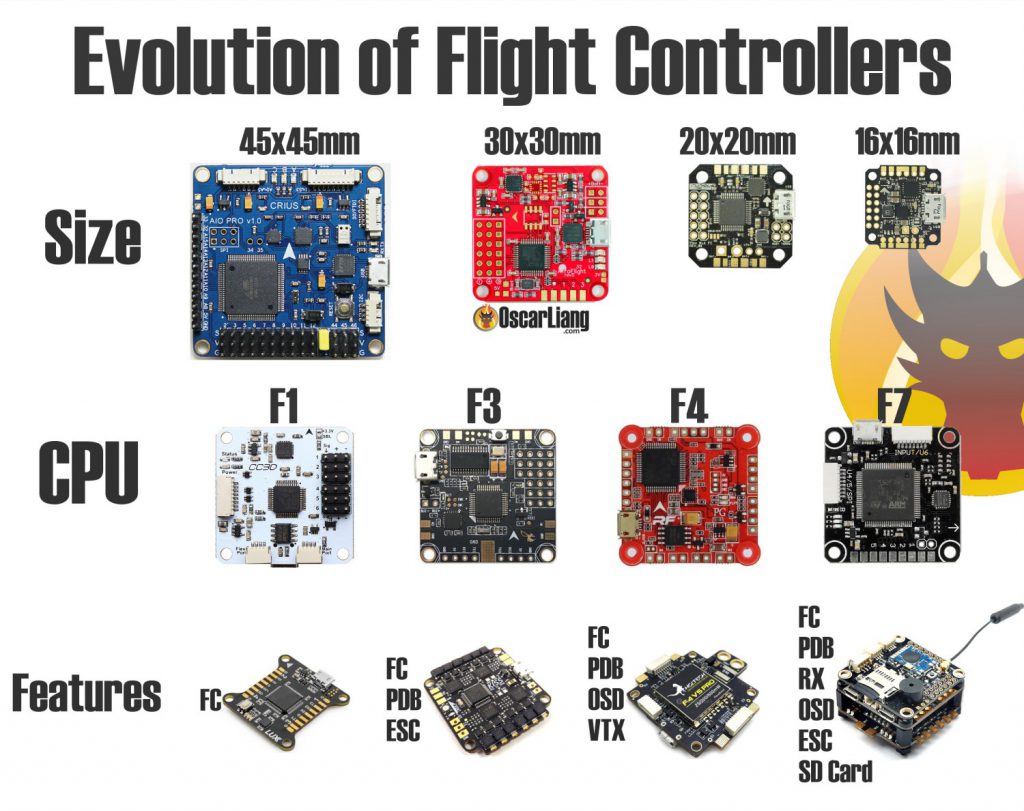
Эволюция полетных контроллеров
Прошивки для ПК
Помимо различий в железе, имеются различия и в прошивках, а также в программах для компьютера.
Вот список прошивок (и их описание) для миникоптеров. Если вы совсем в этом не разбираетесь, то мой вам совет, используйте Betaflight, Raceflight или KISS. У них отличные летные характеристики.
Современные прошивки для ПК можно настраивать используя специальные программы, установленные на компьютер или смартфон; или даже прямо с пульта управления.
«Тюнинг» — этот термин мы используем, когда меняем ПИД коэффициенты, рейты и некоторые другие настройки. При помощи тюнинга мы можем настроить коптер «под себя».
ПО для компьютеров имеет графический интерфейс, а набор доступных настроек отличается в зависимости от прошивки, так что есть некоторый входной уровень знаний при их использовании.

Самые популярные прошивки для полетных контроллеров
После того, как вы выберите прошивку ищите совместимый с ней полетный контроллер.
Процессор (микроконтроллер)
В настоящее время есть 4 основных типа процессоров: F1, F3, F4 и F7. Мы рекомендуем брать F3 или F4, т.к. прошивки уже уперлись в возможности F1 и дальше его нормально не поддерживают, а F7 — довольно новый, и требуется время для полной адаптации прошивок.
| F3 | F4 | F7 | |
| 72 МГц | 72 МГц | 168 МГц | 216 МГц |

Процессоры для ПК (слева направо): STM32 F1, F3, F4
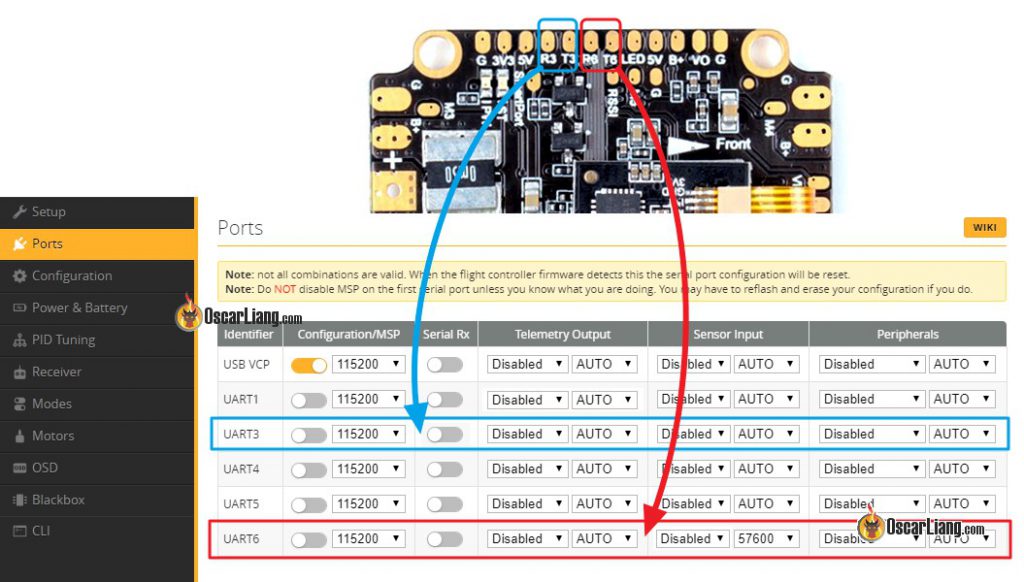
UART (последовательные порты)
UART расшифровывается как Universal Asynchronous Receiver/Transmitter, что означает асинхронный последовательный порт.
UART — это, как правило, аппаратный последовательный интерфейс, который позволит вам подключить разные внешние устройства к полетному контроллеру. Например, приемник, телеметрию, транспондер для гонок, управление видеопередатчиком и т.д.
У каждого последовательного порта два контакта: TX — для передачи, RX — для приема.
Пример: на полетнике есть UART3 и UART6. Вы можете назначить им задачи на вкладке Ports в Betaflight конфигураторе.
Количество последовательных портов в полетном контроллере
Возможно, вам потребуются (а может и нет) дополнительные последовательные порты, чем больше свободных есть, тем проще будет в будущем.
Количество портов зависит от дизайна платы и используемого процессора. Например, на ПК с F1 обычно только 2 порта, у F3 и F4 может быть от 3 до 5, а у F7 — семь или даже больше.
| F3 | F4 | F7 | |
| 2 порта | 3-5 портов | 3-6 портов | 7 и более |
Инвертирование сигнала последовательного порта
Процессоры F3 и F7 могут инвертировать сигнал встроенным инвертором, а F1 и F4 — нет.
Сигналы Frsky SBUS и SmartPort являются инвертированными, поэтому владельцам ПК на F3 и F7 повезло, такие данные понимаются без проблем (F3 и F7 — более новые серии процессоров, подробнее тут).
Однако, более старые процессоры, типа F1 и F4 требуют наличия внешнего инвертора сигнала, который и подключается к соответствующему последовательному порту. Для удобства пользователей некоторые ПК на F4 уже имеют схемы для инверсии сигналов SBUS и SmartPort, так что приемник подключается напрямую к ПК. Если встроенного инвертора нет, то вам придется использовать одно обходных решений, например, программную эмуляцию последовательного порта (soft serial) или найти неинвертированный сигнал на приемнике.
Если портов не хватает, можно использовать программную эмуляцию (soft serial) чтобы создать ещё больше портов. К сожалению, эмулируемые порты работают медленнее аппаратных (нельзя выставить большую скорость) и не подходят для важных задач, где требуется быстрая реакция, например не подойдут для работы с приемниками. Ну и, конечно, программная эмуляция требует довольно много ресурсов процессора.
Гироскопы (Gyro), инерциальная навигация (IMU)
Цель датчиков на ПК определить ориентацию коптера и его движения. Микросхема с датчиками (IMU) содержит как гироскопы, так и акселерометры, но так как большинство FPV пилотов используют Acro Mode, то акселерометры обычно отключаются. Т.е. под IMU обычно подразумеваются только гироскопы (gyro).
Наиболее популярные гироскопы, используемые в полётниках:
| Способ подключения, шины | Макс. частота сэмплирования | |
| MPU6000 | SPI, i2c | 8K |
| MPU6050 | i2c | 4K |
| MPU6500 | SPI, i2c | 32K |
| MPU9150* | i2c | 4K |
| MPU9250* | SPI, i2c | 32K |
| ICM20602 | SPI, i2c | 32K |
| ICM20608 | SPI, i2c | 32K |
| ICM20689 | SPI, i2c | 32K |
* MPU9150 — это MPU6050 со встроенным магнитометром AK8975, а MPU9250 — это MPU6500 с тем же магнитометром.
Выяснить тип можно взглянув на маркировку микросхемы, вот для примера популярный вариант Invensense MPU-6000.

Гироскопы и акселерометры на полетном контроллере
Выбор гироскопов: что лучше высокая частота опроса или шум?
У IMU есть две основные характеристики: максимальная частота семплирования и насколько полученные данные будут зашумлены (механическими вибрациями и электрическими помехами).
В настоящее время очень часто используют микросхему MPU6000, которая поддерживает частоту опроса до 8k, и обладает (неоднократно проверено) хорошей устойчивостью к разного рода шумам и помехам. Главное стараться избегать MPU6500 и MPU9250, хотя у них больше рабочая частота, но и уровень шумов тоже значительно выше.
Скорость работы гироскопов — это палка о двух концах: если питание чистое, и шумов нет, тогда серия ICM на 32k будет работать лучше, чем MPU6000. Однако, если регуляторы и моторы генерят довольно много помех, а коптер вибрирует, тогда ICM хуже, чем MPU6000.
Например, ICM20602 стоит на Raceflight Revolt V2, а ICM20689 на Kakute F4, оба работают на частоте 32k. Однако, в обзорах часто упоминают, что эти гиры более чувствительны к шумам, чем MPU6000, поэтому вышеупомянутые ПК лучше крепить с демпферами (антивибрационное крепление) и использовать конденсаторы для фильтрации помех по питанию, это поможет снизить шум.
В последнее время появляется всё больше и больше ПК с гироскопами на отдельной плате с антивибрационной развязкой (кусок поролона, чтобы снизить вибрации от моторов).

Антивибрационное крепление гироскопов на ПК Kakute F4
i2c или SPI?
i2c и SPI — это названия шин для подключения гироскопов к процессору. Выбранная шина может ограничить частоты опроса гироскопов и ограничит looptime.
Лучше всего использовать SPI, т.к. она позволяет работать с бОльшими частотами, чем i2c, у которой лимит в 4k.
Встроенные функции
OSD может показывать разную информацию на экране: напряжение аккумулятора, таймер и т.д. Те, кто знакомы с MinimOSD помнят сложность настройки, но если вам нравится эта функциональность, тогда выбирайте ПК с OSD.
Betaflight OSD настраивать значительно проще.
PDB или плата распределения питания — достаточно часто встречается в современных ПК, так что регуляторы скорости и основной LiPo аккумулятор подключаются напрямую к полётнику. Благодаря тому, что ПК и PDB это одна плата, а не две, мы экономим место в раме, упрощается разводка и пайка проводов. Недостаток такого решения — у некоторых ПК очень маленькие контактные площадки для пайки.
Датчик тока
Необходимость датчика тока не подлежит сомнению, потребляемый ток и съеденная емкость гораздо полезнее, чем просто напряжение аккумулятора, да и для тестов пригодится.
Регуляторы скорости
Встроенной PDB недостаточно? Есть ПК со встроенными регуляторами! Это значит, что моторы нужно подключать непосредственно к полетному контроллеру, что ещё больше упрощает сборку.
RacerStar Tattoo F4S FC — первый такой ПК в моих руках.
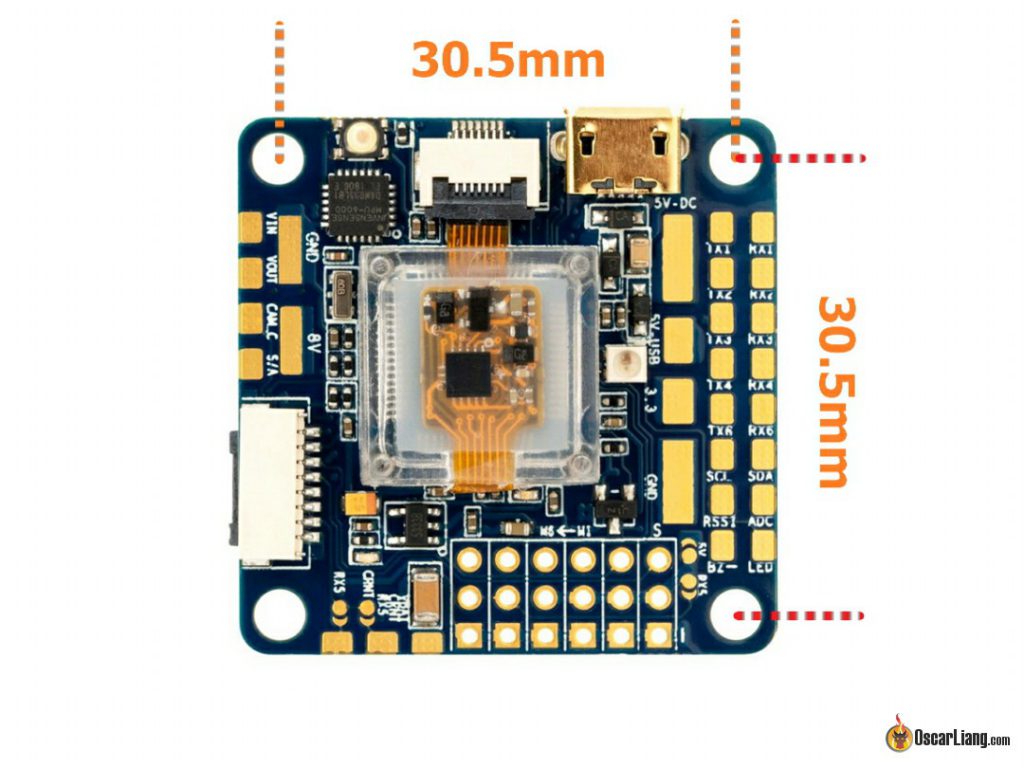
Формат крепежа
В данном случае подразумевается расстояние между крепежными отверстиями в плате полетного контроллера. Обычно это 30,5 х 30,5 мм, 20 х 20 мм или 16 х 16 мм. Формат крепежа определяет как размеры платы, так и размеры модели. В коптерах с 5″ пропами обычно используются ПК с крепежом 30,5 х 30,5, в более мелких коптераз — 20 х 20 мм. Формат 16 х 16 мм набирает популярность в классе коптеров с диагональю до 100 мм.
Прочие функции
Blackbox (черный ящик): чип флэш-памяти или MicroSD карточка?
Есть два способа записать и сохранить данные черного ящика: на чип флэш-памяти установленный на плате ПК или на MicroSD карточку, вставленную в слот.
Чип памяти дешевле, но как правило он имеет небольшую емкость и хранит относительно немного данных, обычно 10-15, иногда 20 минут полетного времени (в зависимости от частоты запрашиваемых данных). Кроме того, загрузка данных с этого чипа идет довольно медленно, может уйти до 5 минут времени на загрузку лога длиной всего 1 минуту.
ПК со встроенным слотом для MicroSD карточек, позволяют хранить данные неделями, без необходимости очистки свободного места. Кроме того, чтение логов очень быстрое.
На мой взгляд выбирать нужно в зависимости от того, как часто вы планируете использовать черный ящик. Если хотите серьезно изучать полетные данные, тогда точно нужно брать ПК с MicroSD слотом.
Кстати, есть еще третий вариант — можно купить внешний логгер (Open Logger) со слотом для microSD и подключить его через свободный UART к ПК.
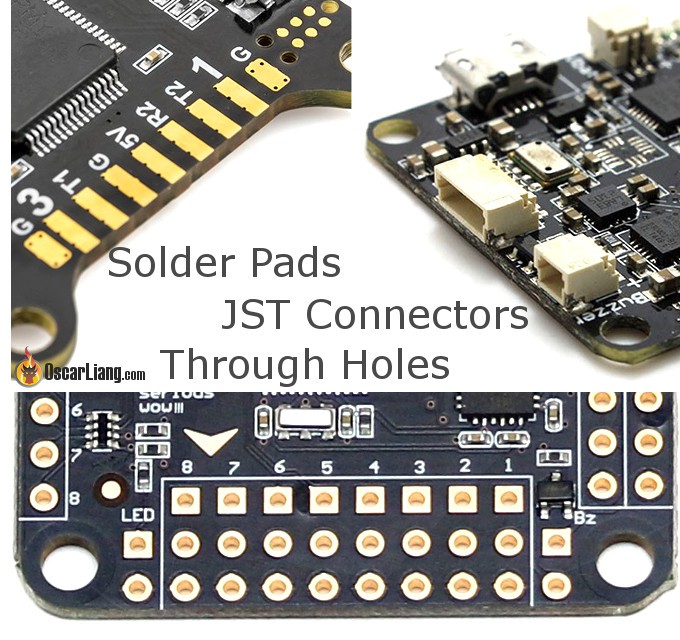
Типы разъемов
Три основных типа разъемов на полетных контроллерах:
- Пластиковые разъемы типа JST
- Контактные площадки («пятаки») для непосредственной пайки проводов
- Сквозные отверстия
Пластиковые разъемы менее надежны, но при этом позволяют быстро отключать/подключать кабели. Контактные площадки более крепкие, но есть риск их перегреть при пайке, и они отслоятся от платы. Наиболее универсальный вариант — сквозные отверстия: можно припаять провода или штыревые разъемы.
BEC (стабилизатор напряжения)
В большинстве полётников уже есть стаб на 5 вольт. В некоторых есть и на 9, и 12 вольт (или на какое-нибудь другое напряжение).
Несмотря на то, что значительную часть FPV оборудования (камеры, видеопередатчики) можно подключать напрямую к литиевому аккумулятору, я считаю, что изображение будет лучше, если питать их через стабилизатор.
Кнопка boot (активация загрузчика)
Нажатая кнопка boot при подаче питания переводит процессор полетного контроллера в режим загрузчика (bootloader mode). В этом режиме можно обновить прошивку, даже если стандартные программы этого сделать не могут.
У многих ПК есть два контакта которые нужно закорачивать для этой цели. Но гораздо приятнее, когда есть кнопка.
Прочие, полезные вещи, которые иногда встречаются в полетных контроллерах
- Встроенный видеопередатчик — главное преимущество: экономия места и веса, у некоторых видеопередатчиков можно менять настройки прямо через контроллер
- Барометр / магнитометр (компас) — это дополнительные датчики, которые совсем не обязательны для гонщиков
- Поддержка протоколов приемника — убедитесь, что ПК поддерживает протокол вашего приемника: PWM, PPM, SBUS, Spektrum Satellite и т.д.
- «Все-в-одном» — такой полетный контроллер состоит из одной платы, на которой есть всё необходимое: PDB, регуляторы, приемник и т.д. Недостаток — если что-то сгорит, то скорее всего придется менять плату целиком
- Поддержка инфракрасного транспондера — позволяет вам изменять время круга самостоятельно
Выбор полетного контроллера
История изменений
- Декабрь 2014 — первая версия статьи
- Ноябрь 2016 — добавлена информация о прошивках, обновлен список фич в ПК
- Февраль 2017 — обновлена информация о процессорах и гироскопах
- Апрель 2017 — добавлена инфографика об эволюции полетных контроллеров, обновлен список процессоров
- Май 2018 — обновлена информация об интеграции функций в ПК
- Октябрь 2018 — добавлена информация о форматах крепежа
Выбираем полетный контроллер для квадрокоптера : 20 комментариев
Добрый день.Подскажите подойдет ли в качестве первого опыта купить kit с алиэкспреса, просто уже 2 месяца хожу, желание купить квадрокоптер не проходит, но деньги большие вкладывать неразумно. На форумах без опыта разбираться тяжко, если не гнаться за рекордами в скорости и дальности какой выбрать ? И желательно чтобы у квадрокоптера был потенциал к развитию и аппаратура, что бы не совсем шлак( квадрокоптер не для съемок), мне приглянулся вот этот, что Вы скажете ? https://ru.aliexpress.com/item/250-Quadcopter-Full-Carbon-Fiber-Frame-Kit-RTF-Quadcopter-with-Remote-Controller/32553802969.html При выборе я рассуждал так: в комплекте нормальная аппаратура и в последствии можно доработать коптер т.е. поменять ПК с f1 на f3 (Matek F405 CTR) двигатель и регуляторы можно оставить. До куплю fpv камеру и передатчик. Пока не разобрался какие нужны аккумуляторы.
Что Вы думаете о моих рассуждениях?
Рама устарела года 2 назад, двигатели тоже устарели, регуляторы слишком слабые (12А); ни камеры, ни видеопередатчика в комплекте я не увидел. В общем, не рекомендую.
Если брать готовое, то ПК на F3, регули мин 20А; либо что-то игрушечное, «на побаловаться», типа MJI Bugs 3
Аппаратура подойдет для начинающего? И устаревшая рама чем мне грозит? Несовпадут отверстия для современных комплектующих?
Аппа какая-то простая от FlySky, я плохо знаю их модельный ряд. Это конечно лучше, чем игрушечные пульты от игрушечных коптеров, но все равно не серьезно.
Рама: старая и тяжелая.
Если только «побаловаться» — тогда можно купить этот комплект; только есть риск разочароваться именно из-за его слабеньких возможностей, сложности апгрейда, необходимости дальше (практически сразу же) вкладываться в апгрейд.
Имхо лучше потратить еще месяц, почитать статьи о сборке коптеров, и здесь, и на многих других сайтах обычно указываются конфигурации; ну и купить указанные комплектующие.
Здравствуйте! Подскажите пожалуйста, я никак не могу разобраться и найти подтверждение. У меня Bayangtoys x16 GPS, хочу установить на него 3-х осевой подвес для видеосъёмки. Я так понимаю, что подвес должен быть совместим с контроллером самого коптер? Так вот какой он на баянге не могу найти. Например подвес от DJI zenmuse h3-3d, будет ли он совместим с баянгом?
Или tarot 3d. Что посоветуете. Я сам-то видео оператор, а в fpv сьемке новичок и очень хотелось бы экспертного мнения. И так нужен 3-х осевой? Читал, что лучше поменять ноги родные на фантомные, они якобы шире и в кадр лезть не будут.
Посмотрел на характеристики Bayangtoys x16 GPS, не увидел там контактов для подключения подвеса, но я мельком глядел. В первую очередь читайте rcdesign, например тут http://forum.rcdesign.ru/f135/thread463586.html
Подвес должен откуда-то получать информацию о наклоне/повороте камеры, это не обязательно должен быть полетный контроллер, это может быть отдельный приемник. Т.е. если ваш коптер не позволяет подключить подвес, тогда берете еще одну аппаратуру управления и приемник к ней, с этой аппы и будете управлять подвесом.
Но, ИМХО, это все «полумеры», вы будете больше времени тратить на управление коптером и камерой, чем собственно снимать. Поэтому смотрите на готовые решения типа mavic pro или air.
Приёмник родной с сотелитом на 7 каналов. Просто я с ним на 2.5км.летаю без потери сигнала. Этим он мне и нравиться. А можете посоветовать приёмник который подойдёт для моей древней spektrum dx7 если конечно есть такие в природе.
Я не спец по спектруму, но судя по всему там только PWM выходы.
Поэтому самый простой вариант — подключать только сателлит, Betaflight их поддерживает.
В смысле сателлит?
В прямом. Вы же сами написали, что у вас приемник с сателлитом, вот его и подключайте к полетному контроллеру.
Сателлит без приёмника? Че-то я сомневаюсь что он будет работать без приёмника, но попробую. Спасибо за совет
Что планируется на этом долголете нести? Просто HD камеру или камеру с подвесом? Для подвеса 180 размер маловат.
Регуляторы и мозги по нынешним меркам староваты (для гонок), но если не гнаться за новшествами, то вполне пойдут для долголета. Хотя, я бы подумал, и возможно выбрал бы полетник на F4 или даже на F7, чтобы было побольше последовательных портов для управления периферией: камера, видеопередатчик, приемник, GPS и т.д.
Подскажите какой полетный контроллер подходит ?
Процессор STM32F407VGT6
Акселерометр: MPU6000
Компас: HMC5883
Барометр: MS5611
Память: FRAM FM25V01
Слот для MicroSD карты памяти
“>