Содержание
- 1 Orange Pi One + Питание
- 2 Часы на Arduino и дисплее Nexion.
- 3 Фрезерный станок с ЧПУ готов.
- 4 Биполярные ШД с 6-ю выводами подключаются к драйверу двумя способами:
- 5 Униполярный шаговый двигатель можно переделать.
- 6 Шаговые двигателя с 8-ю выводами можно подключить тремя способами.
- 7 Термофен для усадки термоусадки
- 8 Жук с вибро моторчиком на 3D принтере
- 9 Печать ABS пластиком после модернизации Anet A8
- 10 Биполярные ШД с 6-ю выводами подключаются к драйверу двумя способами:
- 11 Униполярный шаговый двигатель можно переделать.
- 12 Шаговые двигателя с 8-ю выводами можно подключить тремя способами.
- 13 Подпишитесь на автора
- 14 Подпишитесь на автора
Orange Pi One + Питание

Часы на Arduino и дисплее Nexion.

Фрезерный станок с ЧПУ готов.


Любая разработка начинается с выбора компонентов. При разработке ЧПУ станка очень важно правильно подобрать шаговые двигателя . Если у вас есть деньги на покупку новых двигателей, в таком случае нужно определить рабочее напряжения и мощность двигателя. Я купил себе для второго ЧПУ станка шаговые двигателя вот такие: Nema17 1.7 А.
Если у вас нет достаточно денег или вы просто пробуете свои силы в данной сфере. То вы скорее всего будите использовать двигателя из принтеров . Это самый недорогой вариант. Но тут Вы столкнетесь с рядом проблем. У двигателя может быть 4, 5, 6, 8 — проводов для подключения. Как их подключить к драйверам L298n и СNC shield.
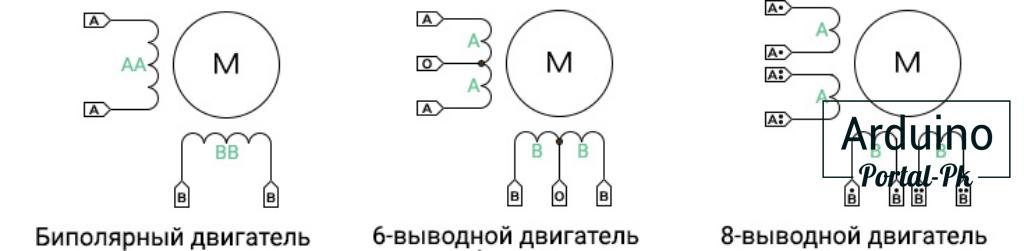
Давайте разберемся по порядку. Какие шаговые двигателя бывают. Если вы видите четное количество выводов это биполярный шаговый двигатель . Расположение обмотки для данного двигателя вот такое.
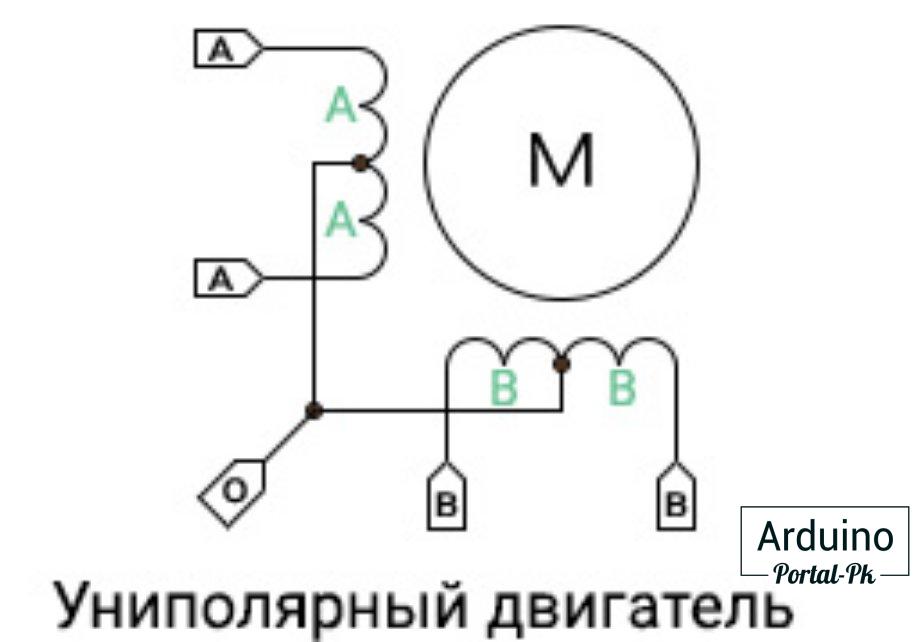
Если у двигателя 5 выводов, это униполярный шаговый двигатель . Вот так выгладит его схема.
Наши драйвера рассчитаны на двигателя с 4 выводами . Как быть? Как их подключить?
Биполярные ШД с 6-ю выводами подключаются к драйверу двумя способами:
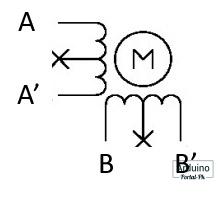
В данном случае ШД имеет момент в 1.4 раза больше. Момент более стабилен на низких частотах.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток – 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R – именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность ШД — I*2 * R
При последовательном включении обмоток потребляемая мощность становится Iпосл.*2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому I*2 * R = Iпосл.*2 * 2* R, откуда
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
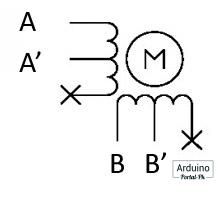
Во втором случае момент более стабилен на высоких частотах. Параметры ШД при таком подключении соответствуют заявленным в datasheet, (момент, ток), момент более стабилен на высоких частотах .
Униполярный шаговый двигатель можно переделать.
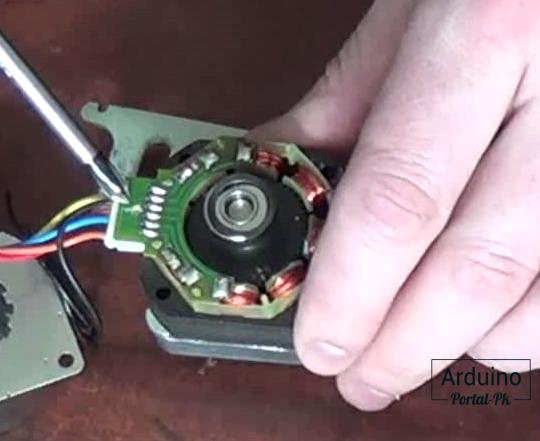
Для этого нужно разобрать шаговый двигатель и перерезать провод соединяющий центр обмоток. И при подключении общий провод подключать ни куда не нужно.
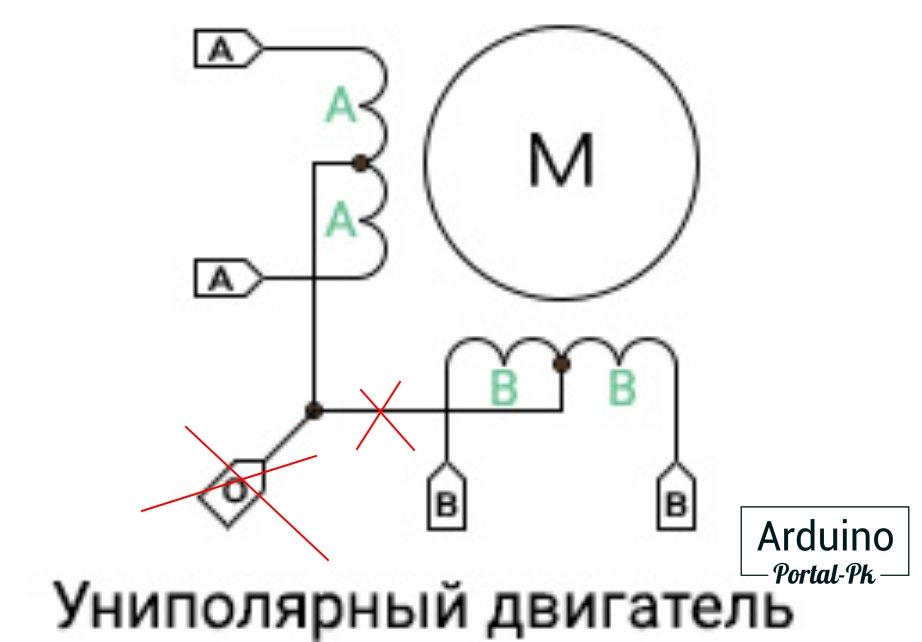
В итоге у нас получается биполярный двигатель с 4 выводами.
Шаговые двигателя с 8-ю выводами можно подключить тремя способами.
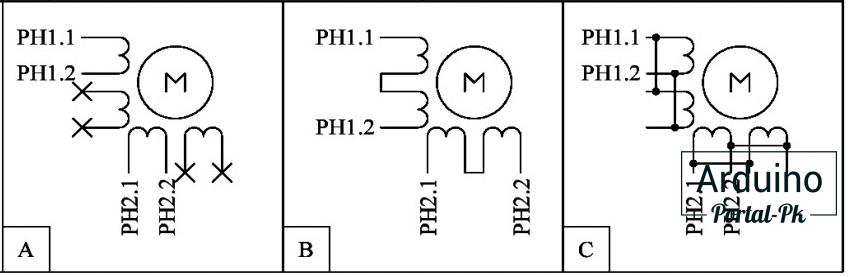
Подключение А – шаговик работает с характеристиками, заявленными в описании (момент, ток), момент более стабилен на высоких частотах.
Подключение B – момент ↑1.4 раза, момент более стабилен на низких частотах (относительно А).
Подключение C – момент ↑1.96 раза, момент более стабилен на высоких частотах (относительно А).
Вот мы и решили проблему подключения шаговых двигателей. Но не все двигателя у нас заработают. Нужно еще определить рабочее напряжение двигателей. Самый правильный способ это найти datasheet. Так все параметры есть. Но не ко все двигателя из принтера можно найти datasheet. В таких случаях я пользуюсь вот такой таблицой .
Сопротивление обмотки, Ом
Рабочее напряжение, В
Не знаю на сколько данная таблица верная но у меня все сходиться и работает как надо.
Двигателя я выбираю чтобы рабочее напряжение было меньше или равно напряжению источника питания. Для двигателей рассчитанных на меньшее напряжения необходимо настроить ток ниже.
Настраивать СNC shield будем в следующей статье. Не пропустите!
Подписывайтесь на мой канал на Youtube и вступайте в группы в Вконтакте и Facebook.
Термофен для усадки термоусадки

Жук с вибро моторчиком на 3D принтере

Печать ABS пластиком после модернизации Anet A8

Любая разработка начинается с выбора компонентов. При разработке ЧПУ станка очень важно правильно подобрать шаговые двигателя . Если у вас есть деньги на покупку новых двигателей, в таком случае нужно определить рабочее напряжения и мощность двигателя. Я купил себе для второго ЧПУ станка шаговые двигателя вот такие: Nema17 1.7 А.
Если у вас нет достаточно денег или вы просто пробуете свои силы в данной сфере. То вы скорее всего будите использовать двигателя из принтеров . Это самый недорогой вариант. Но тут Вы столкнетесь с рядом проблем. У двигателя может быть 4, 5, 6, 8 — проводов для подключения. Как их подключить к драйверам L298n и СNC shield.
Давайте разберемся по порядку. Какие шаговые двигателя бывают. Если вы видите четное количество выводов это биполярный шаговый двигатель . Расположение обмотки для данного двигателя вот такое.
Если у двигателя 5 выводов, это униполярный шаговый двигатель . Вот так выгладит его схема.
Наши драйвера рассчитаны на двигателя с 4 выводами . Как быть? Как их подключить?
Биполярные ШД с 6-ю выводами подключаются к драйверу двумя способами:
В данном случае ШД имеет момент в 1.4 раза больше. Момент более стабилен на низких частотах.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток – 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R – именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность ШД — I*2 * R
При последовательном включении обмоток потребляемая мощность становится Iпосл.*2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому I*2 * R = Iпосл.*2 * 2* R, откуда
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Во втором случае момент более стабилен на высоких частотах. Параметры ШД при таком подключении соответствуют заявленным в datasheet, (момент, ток), момент более стабилен на высоких частотах .
Униполярный шаговый двигатель можно переделать.
Для этого нужно разобрать шаговый двигатель и перерезать провод соединяющий центр обмоток. И при подключении общий провод подключать ни куда не нужно.
В итоге у нас получается биполярный двигатель с 4 выводами.
Шаговые двигателя с 8-ю выводами можно подключить тремя способами.
Подключение А – шаговик работает с характеристиками, заявленными в описании (момент, ток), момент более стабилен на высоких частотах.
Подключение B – момент ↑1.4 раза, момент более стабилен на низких частотах (относительно А).
Подключение C – момент ↑1.96 раза, момент более стабилен на высоких частотах (относительно А).
Вот мы и решили проблему подключения шаговых двигателей. Но не все двигателя у нас заработают. Нужно еще определить рабочее напряжение двигателей. Самый правильный способ это найти datasheet. Так все параметры есть. Но не ко все двигателя из принтера можно найти datasheet. В таких случаях я пользуюсь вот такой таблицой .
Сопротивление обмотки, Ом
Рабочее напряжение, В
Не знаю на сколько данная таблица верная но у меня все сходиться и работает как надо.
Двигателя я выбираю чтобы рабочее напряжение было меньше или равно напряжению источника питания. Для двигателей рассчитанных на меньшее напряжения необходимо настроить ток ниже.
Настраивать СNC shield будем в следующей статье. Не пропустите!
Подписывайтесь на мой канал на Youtube и вступайте в группы в Вконтакте и Facebook.
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Как-то раз достался мне (абсолютно безвозмездно) хладный труп лазерного принтера.
Принтер был разобран на органы, ценного и полезного для rep-rap-а в нем ничего не нашлось, кроме пожалуй шагового двигателя Mitsumi M49SP-1. Польза в котором сомнительная.

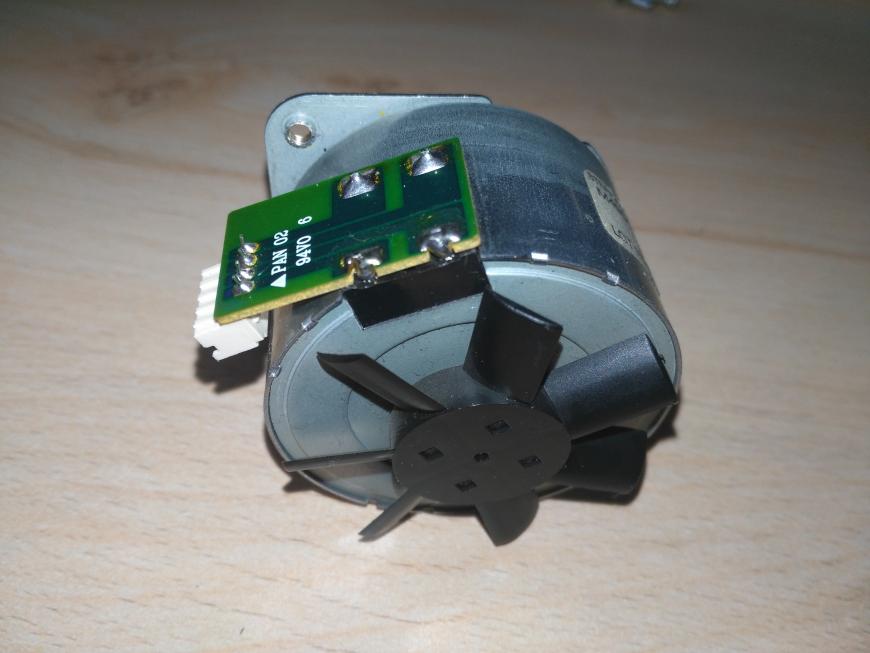
Погуглил, двигатель вроде достаточно мощный. Один весомый минус – шаг в 7,5 градусов.
После раздумий куда его применить, пришла в голову мысль попробовать его в качестве привода экструдера принтера. В качестве эксперимента. Нормальные, обычные Nema17 шаговики у меня есть в некотором количестве,

но вот захотелось поэкспериментировать. Стало интересно, мысль овладела головой и руками.
Еще подумалось что микрошаг 32 ситуацию с шагом в 7,5 градусов слегка улучшит.
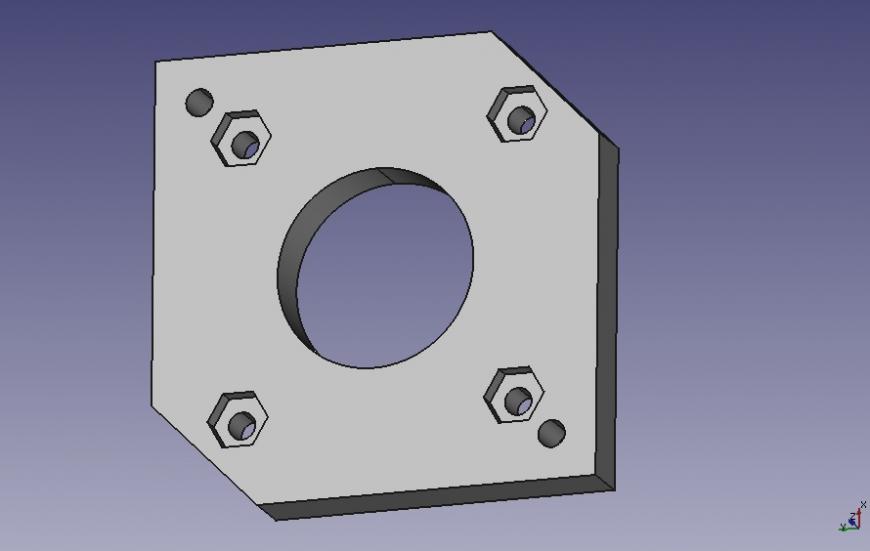
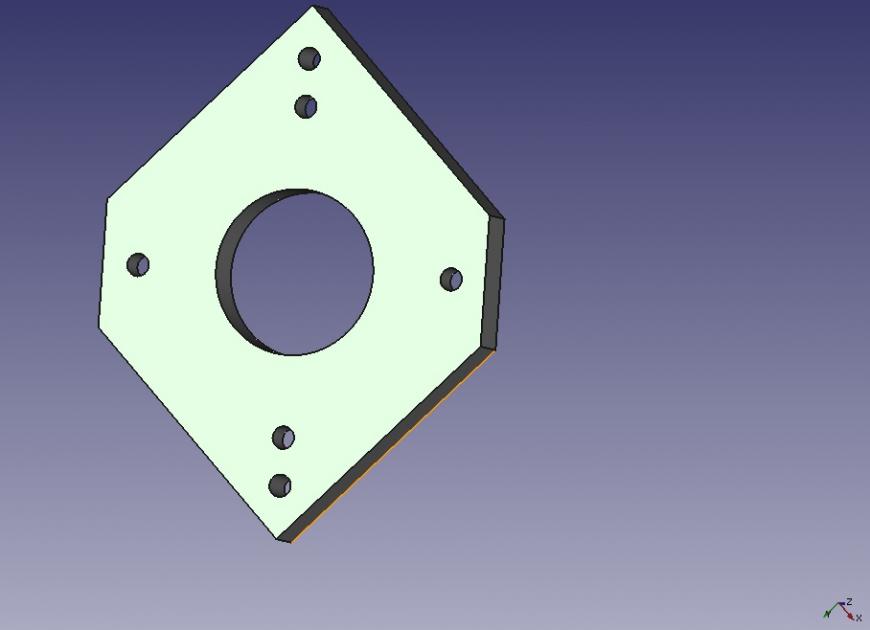
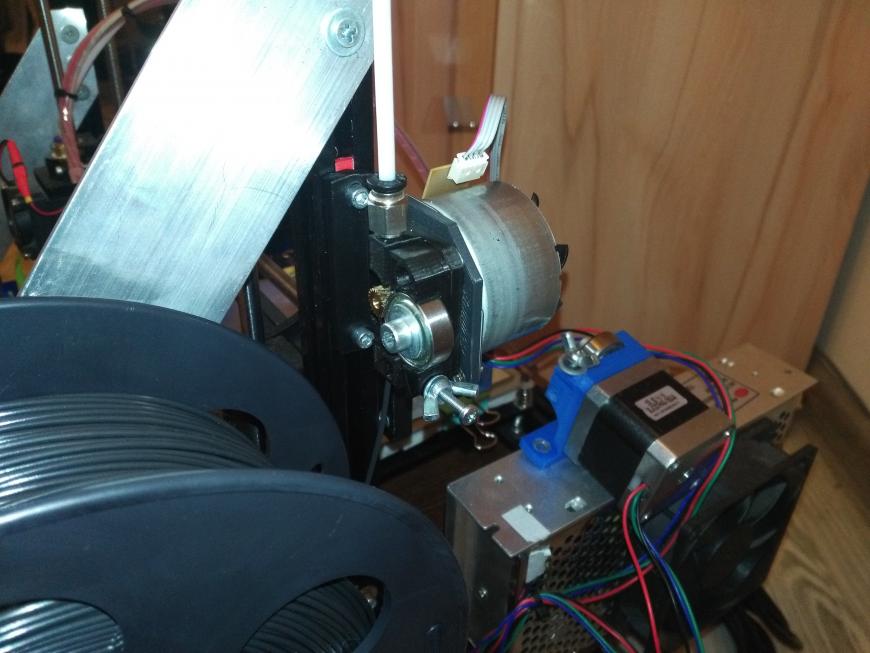
Спроектировал во FreeCAD-е и распечатал переходную пластину с закладными гайками м3 с этого мотора на nema17.


Родную шестерню не удалял, зубчики достаточно острые и по идее должны вполне цепляться за пруток.
Распечатанный экструдер у меня уже был, печатал остатками китайского пла.

С моим принтером пришел такой же, только литой. А модельку случайно нашел на тинге и распечатал в некотором количестве.
Собрал монстр-экструдер воедино.


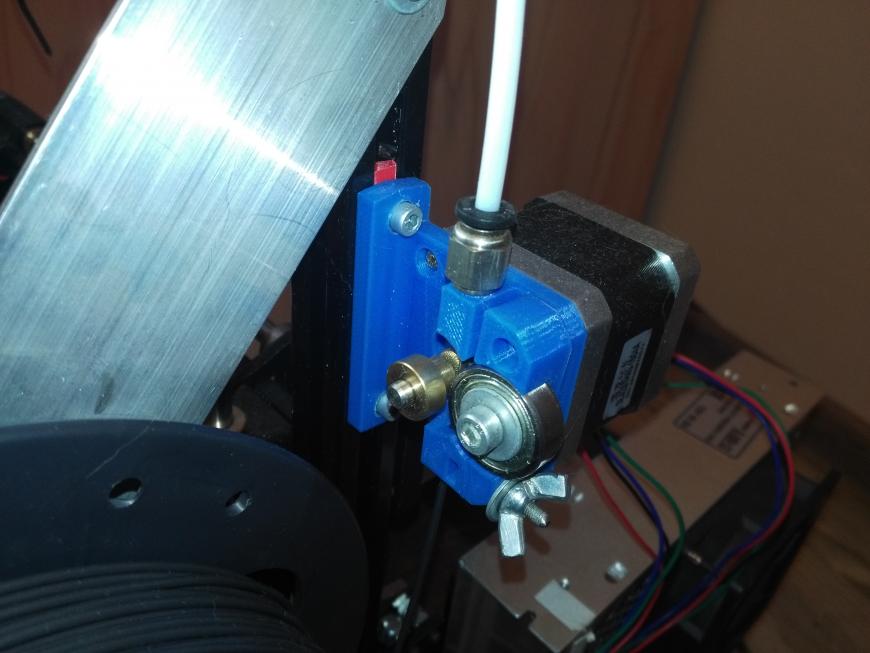
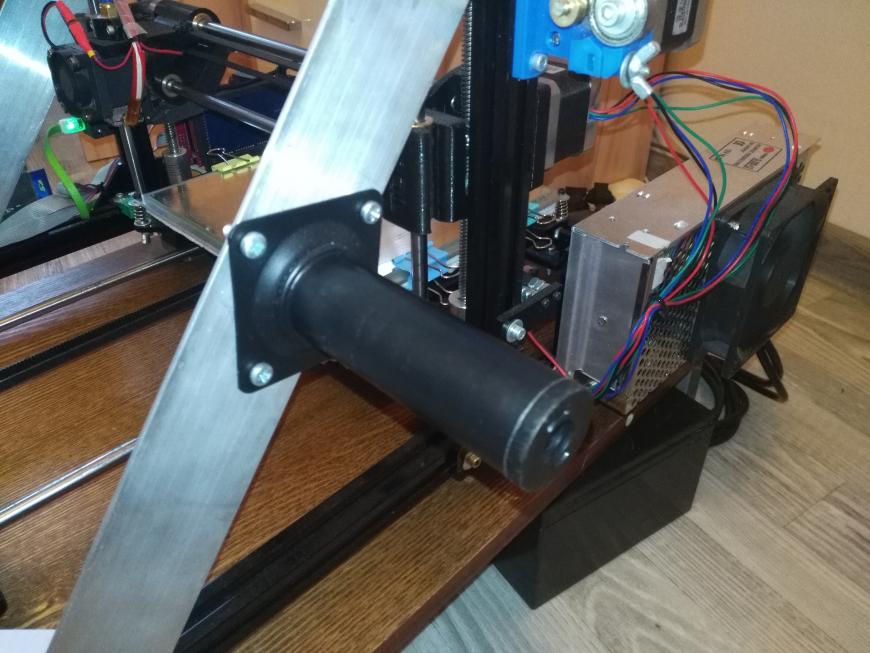
Ножка из Леруа Мерлен на укосине.
А в катушку распечатал вот такие вставки и стопор.



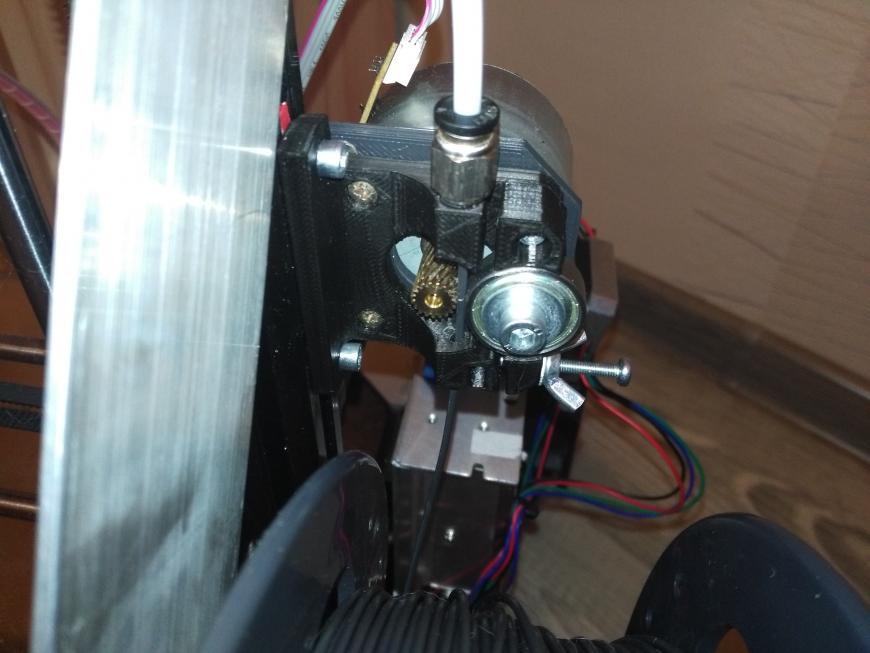

Ток выставил экспериментально, чтоб мотор крутился и не пропускал шаги под нагрузкой.
Экспериментально определил количество шагов на 1см.
Тестовая печать прямоугольного столба в 2 стенки.
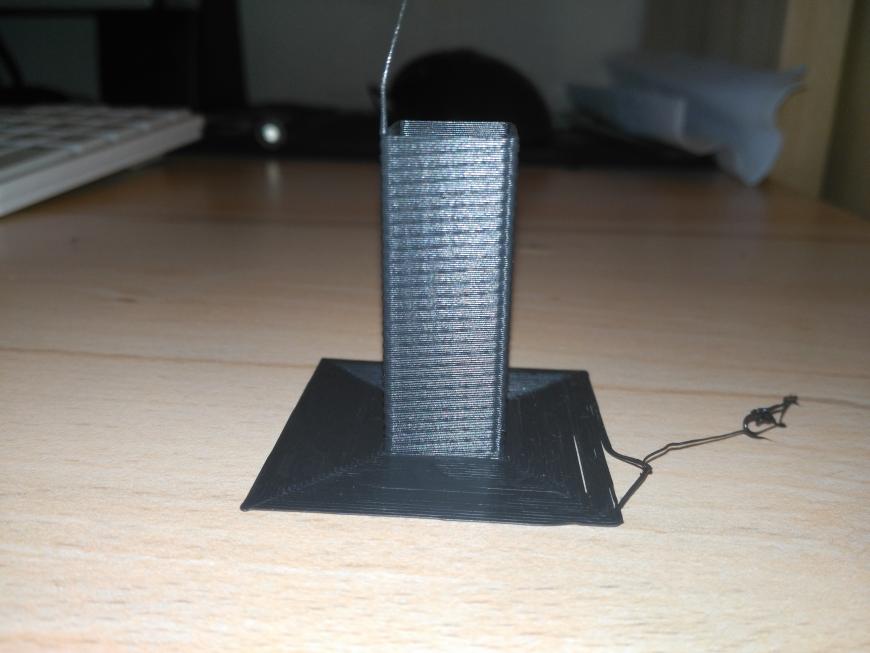
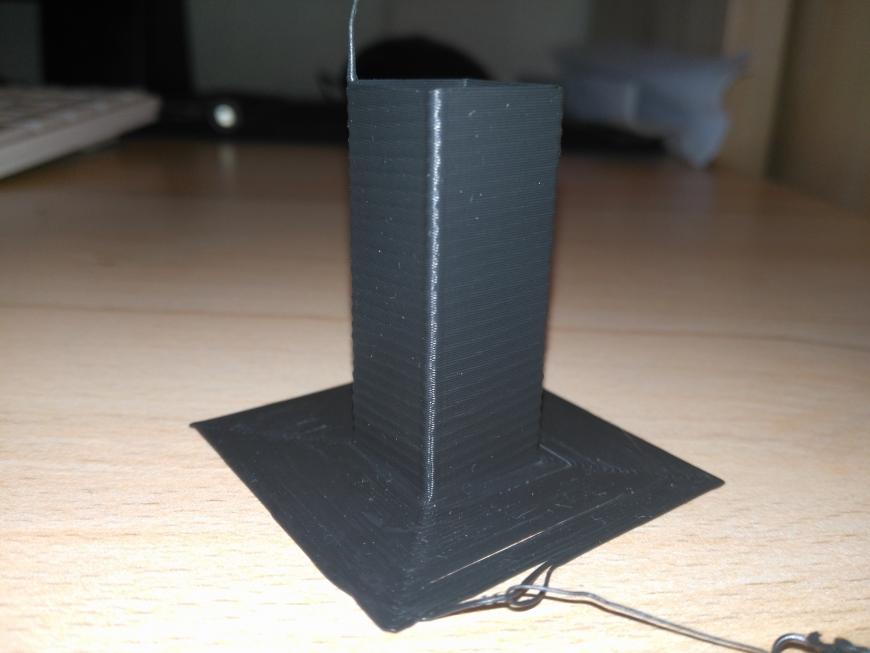
. дала вот такие занимательные артефакты.
Оно даже печатает, но при печати мотор разогрелся.
В общем для прямого привода моторчик явно не годится. 🙂
Надо попробовать собрать экструдер с редуктором или с ременной передачей.
Прекрасно понимаю что все это блажь и баловство, не заменит этот моторчик хорошо работающий nema17 17hs4401.
Подытожу: не каждый эксперимент удачный, зато в процессе приобретается бесценный опыт 🙂
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.