Содержание
- 1 Что такое ШИМ?
- 2 Формирование ШИМ-сигналов
- 3 Выходное управляющее напряжение (OUT)
- 4 Ещё о функциях контроллеров ШИМ
- 5 Частота работы устройств, синхронизация
- 6 ШИМ-контроллеры в составе блоков питания
- 7 Составляющие схемы блоков питания с ШИМ-контроллерами
- 8 Основные проблемы ШИМ-преобразователей
- 9 Диагностика неисправностей
- 10 В заключение
Один из используемых подходов, позволяющих существенно сократить потери на нагревании силовых компонентов радиосхем, представляет собой использование переключательных режимов работы установок. При подобных системах электросиловой компонент или раскрыт – в это время на нем наблюдается фактически нулевое падение напряжения, или открыт – в это время на него подается нулевой ток. Рассеиваемую мощность можно вычислить, перемножив показатели силы тока и напряжения. В этом режиме получается достичь коэффициента полезного действия около 75-80% и более.
Что такое ШИМ?
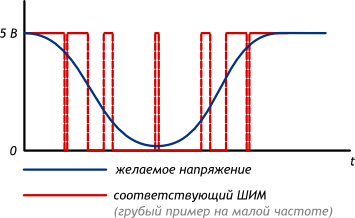
Для получения на выходе сигнала требуемой формы силовой ключ должен открываться всего лишь на определенное время, пропорциональное вычисленным показателям выходного напряжения. В этом и заключается принцип широтно-импульсной модуляции (ШИМ, PWM). Далее сигнал такой формы, состоящий из импульсов, разнящихся по своей ширине, поступает в область фильтра на основе дросселя и конденсатора. После преобразования на выходе будет практически идеальный сигнал требуемой формы.
Область применения ШИМ не ограничивается импульсными источниками питания, стабилизаторами и преобразователями напряжения. Использование данного принципа при проектировании мощного усилителя звуковой частоты дает возможность существенно снизить потребление устройством электроэнергии, приводит к миниатюризации схемы и оптимизирует систему теплоотдачи. К недостаткам можно причислить посредственное качество сигнала на выходе.
Формирование ШИМ-сигналов
Создавать ШИМ-сигналы нужной формы достаточно трудно. Тем не менее индустрия сегодня может порадовать замечательными специальными микросхемами, известными как ШИМ-контроллеры. Они недорогие и целиком решают задачу формирования широтно-импульсного сигнала. Сориентироваться в устройстве подобных контроллеров и их использовании поможет ознакомление с их типичной конструкцией.
Стандартная схема контроллера ШИМ предполагает наличие следующих выходов:
- Общий вывод (GND). Он реализуется в виде ножки, которая подключается к общему проводу схемы питания устройства.
- Вывод питания (VC). Отвечает за электропитание схемы. Важно не спутать его с соседом с похожим названием – выводом VCC.
- Вывод контроля питания (VCC). Как правило, чип контроллера ШИМ принимает на себя руководство силовыми транзисторами (биполярными либо полевыми). В случае если напряжение на выходе снизится, транзисторы станут открываться лишь частично, а не целиком. Стремительно нагреваясь, они в скором времени выйдут из строя, не справившись с нагрузкой. Для того чтобы исключить такую возможность, необходимо следить за показателями напряжения питания на входе микросхемы и не допускать превышения расчетной отметки. Если напряжение на данном выводе опускается ниже установленного специально для этого контроллера, управляющее устройство отключается. Как правило, данную ножку соединяют напрямую с выводом VC.
Выходное управляющее напряжение (OUT)
Количество выводов микросхемы определяется её конструкцией и принципом работы. Не всегда удается сразу разобраться в сложных терминах, но попробуем выделить суть. Существуют микросхемы на 2-х выводах, управляющие двухтактными (двухплечевыми) каскадами (примеры: мост, полумост, 2-тактный обратный преобразователь). Существуют и аналоги ШИМ-контроллеров для управления однотактными (одноплечевыми) каскадами (примеры: прямой/обратный, повышающий/понижающий, инвертирующий).
Помимо этого, выходной каскад может быть по строению одно- и двухтактным. Двухтактный используется в основном для управления полевым транзистором, зависящим от напряжения. Для быстрого закрытия необходимо добиться быстрой разрядки емкостей "затвор – исток" и "затвор – сток". Для этого как раз и используется двухтактный выходной каскад контроллера, задачей которого является обеспечение замыкание выхода на общий кабель, если требуется закрыть полевой транзистор.
Для контроля над биполярным транзистором двухтактный каскад не используется, так как управление осуществляется с помощью тока, а не напряжения. Для закрытия биполярного транзистора достаточно всего лишь прекратить протекание тока через базу. При этом замыкание базы на общий провод необязательно.
Ещё о функциях контроллеров ШИМ
Задумав спроектировать контроллер ШИМ своими руками, необходимо как следует продумать все детали его реализации. Только так можно создать работающее устройство. Кроме вышеуказанных выходов, работа ШИМ-контроллера подразумевает наличие следующих функций:
- Опорное напряжение (VREF). Фабричные изделия для удобства обычно дополняются функцией выработки стабильного опорного напряжения. Специалисты заводов-изготовителей рекомендуют соединять данный вывод с общим проводом через емкость не менее 1 мкФ для повышения качества и возможности стабилизации опорного напряжения.
- Ограничение тока (ILIM). Если показатели напряжения на данном выводе существенно превышают установленное (как правило, около 1 В), то контроллер автоматически закрывает силовые ключи. В случаях, когда показатель напряжения превышает второе пороговое значение (в пределах 1,5-2 В), устройство тут же обнуляет напряжение на подключении к мягкому старту.
- Мягкий старт (SS). Показатель напряжения на данном выходе определяет максимально допустимую ширину будущих модулируемых импульсов. На данный вывод подает ток установленной величины. Если между ним и всеобщим кабелем вмонтировать дополнительную емкость, то она будет медленно, но уверенно заряжаться, что приведет к постепенному расширению каждого импульса от минимума вплоть до окончательного расчетного значения. Благодаря этому можно обеспечить плавное, а не стремительное нарастание величин тока и напряжения в общей схеме устройства, благодаря чему такая система и заслужила свое название "мягкий старт". При этом, если специально ввести ограничение по напряжению на данном выводе, допустим, подключив делитель напряжения и систему диодов, можно и вовсе ограничить превышение импульсами некоего задаваемого значения ширины.
Частота работы устройств, синхронизация
Микросхемы ШИМ-контроллеров могут применяться для различных целей. Чтобы отладить их совместную работу с другими элементами устройства, следует разобраться, как устанавливать те или иные параметры работы контроллера и какие компоненты цепи за это отвечают.
- Резистор и емкость, задающие частоту работы всего устройства (RT, CT). Каждый контроллер может работать лишь на определенно заданной частоте. Каждый из импульсов следует лишь с этой частотой. Устройство может менять длительность импульсов, их форму и протяженность, но только не частоту. На практике это означает, что чем меньше протяженность импульса, тем длительнее пауза между ним и следующим. При этом частота следования всегда неизменна. Емкость, подключенная между ножкой CT и общим кабелем, и резистор, подключенный к выходу RT и общему кабелю, в комбинации могут задавать частоту, на которой будет работать контроллер.
- Синхроимпульсы (CLOCK). Весьма распространены случаи, в которых требуется отладить работу нескольких контроллеров так, чтобы выходные сигналы формировались синхронно. Для этого к одному из контроллеров (как правило, ведущему) требуется подключить частотозадающие емкость и резистор. На выходе CLOCK контроллера сразу же появятся короткие импульсы, соответствующие напряжению, которые подаются на аналогичные выходы всей группы устройств. Их принято называть ведомыми. Выводы RT таких контроллеров следует объединить с ножками VREF, а CT – с общим кабелем.
- Напряжение сравнения (RAMP). На этот вывод следует подавать сигнал пилообразной формы (напряжение). При возникновении синхроимпульса на выходе устройства образуется открывающее контрольное напряжение. После того как показатель напряжения на RAMP становится больше в несколько раз, чем величина выходного напряжения на усилителе ошибки, на выходе можно наблюдать импульсы, отвечающие закрывающему напряжению. Длительность импульса может рассчитывать от момента возникновения синхроимпульса вплоть до момента многократного превышения показателя напряжения на RAMP над величиной выходного напряжения усилителя ошибки.
ШИМ-контроллеры в составе блоков питания
Блок питания является неотъемлемым элементом большинства современных девайсов. Срок его эксплуатации практически ничем не ограничен, но от его исправности во многом зависит безопасность работы подконтрольного устройства. Спроектировать блок питания можно и своими руками, изучив принцип его действия. Основная цель – формирование нужной величины напряжения питания, обеспечение её стабильности. Для большинства мощных устройств гальванической развязки, основанной на действии трансформатора, будет недостаточно, да и подобранный элемент явно удивит пользователей своими габаритами.

Увеличение частоты тока питания позволяет существенно уменьшить размеры используемых компонентов, что обеспечивает популярность блоков питания, работающих на частотных преобразователях. Один из самых простых вариантов реализации питающих элементов – блок-схема, состоящая из прямого и обратного преобразователей, генератора и трансформатора. Несмотря на видимую простоту реализации таких схем, на практике они демонстрируют больше недочетов, чем преимуществ. Большинство получаемых показателей стремительно изменяются под влиянием скачков напряжения питания, при загрузке выхода преобразователя и даже при увеличении температуры окружающей среды. ШИМ-контроллеры для блоков питания дают возможность стабилизировать схему, а также воплотить множество дополнительных функций.
Составляющие схемы блоков питания с ШИМ-контроллерами
Типовая схема состоит из генератора импульсов, в основе которого лежит ШИМ-контроллер. Широтно-импульсная модуляция дает возможность собственноручно контролировать амплитуду сигнала на выходе ФНЧ, изменяя при необходимости длительность импульса или его скважность. Сильная сторона ШИМ – высокий КПД усилителей мощности, в особенности звука, что в целом обеспечивает устройствам довольно обширную сферу применения.
ШИМ-контроллеры для блоков питания могут использоваться в схемах с различными мощностями. Для реализации относительно маломощных схем необязательно включать в их состав большое число элементов – в качестве ключа может выступать обычный полевой транзистор.
ШИМ-контроллеры для источников питания большой мощности могут иметь также элементы управления выходным ключом (драйверы). В качестве выходных ключей рекомендуется использовать IGBT-транзисторы.
Основные проблемы ШИМ-преобразователей
При работе любого устройства полностью исключить вероятность поломки невозможно, и преобразователей это тоже касается. Сложность конструкции при этом не имеет значения, проблемы в эксплуатации может вызвать даже известный ШИМ-контроллер TL494. Неисправности имеют различную природу – некоторые из них можно выявить на глаз, а для обнаружения других требуется специальное измерительное оборудование.
Чтобы узнать, как проверить ШИМ-контроллер, следует ознакомится со списком основных неисправностей приборов, а лишь позже – с вариантами их устранения.
Диагностика неисправностей
Одна из часто встречающихся проблем – пробой ключевых транзисторов. Результаты можно увидеть не только при попытке запуска устройства, но и при его обследовании с помощью мультиметра.
Кроме того, существуют и другие неисправности, которые несколько сложнее обнаружить. Перед тем как проверить ШИМ-контроллер непосредственно, можно рассмотреть самые распространенные случаи поломок. К примеру:
- Контроллер глохнет после старта – обрыв петли ОС, перепад по току, проблемы с конденсатором на выходе фильтра (если таковой имеется), драйвером; возможно, разладилось управление ШИМ-контроллером. Надо осмотреть устройство на предмет сколов и деформаций, замерить показатели нагрузки и сравнить их с типовыми.
- ШИМ-контроллер не стартует – отсутствует одно из входных напряжений или устройство неисправно. Может помочь осмотр и замер выходного напряжения, в крайнем случае, замена на заведомо рабочий аналог.
- Напряжение на выходе отличается от номинального – проблемы с петлей ООС или с контроллером.
- После старта ШИМ на БП уходит в защиту при отсутствии КЗ на ключах – некорректная работа ШИМ или драйверов.
- Нестабильная работа платы, наличие странных звуков – обрыв петли ООС или цепочки RC, деградация емкости фильтра.
В заключение
Универсальные и многофункциональные ШИМ-контроллеры сейчас можно встретить практически везде. Они служат не только в качестве неотъемлемой составляющей блоков питания большинства современных устройств – типовых компьютеров и других повседневных девайсов. На основе контроллеров разрабатываются новые технологии, позволяющие существенно сократить расход ресурсов во многих отраслях человеческой деятельности. Владельцам частных домов пригодятся контроллеры заряда аккумуляторов от фотоэлектрических батарей, основанные на принципе широтно-импульсной модуляции тока заряда.
Высокий коэффициент полезного действия делает разработку новых устройств, действие которых основывается на принципе ШИМ, весьма перспективной. Вторичные источники питания – вовсе не единственное направление деятельности.
Раньше для питания устройств использовали схему с понижающим (или повышающим, или многообмоточным) трансформатором, диодным мостом, фильтром для сглаживания пульсаций. Для стабилизации использовались линейные схемы на параметрических или интегральных стабилизаторах. Главным недостатком был низкий КПД и большой вес и габариты мощных блоков питания.
Во всех современных бытовых электроприборах используются импульсные блоки питания (ИБП, ИИП – одно и то же). В большинстве таких блоков питания в качестве основного управляющего элемента используют ШИМ-контроллер. В этой статье мы рассмотрим его устройство и назначение.
Определение и основные преимущества
ШИМ-контроллер – это устройство, которое содержит в себе ряд схемотехнических решений для управления силовыми ключами. При этом управление происходит на основании информации полученной по цепям обратной связи по току или напряжению – это нужно для стабилизации выходных параметров.
Иногда, ШИМ-контроллерами называются генераторы ШИМ-импульсов, но в них нет возможности подключить цепи обратной связи, и они подходят скорее для регуляторов напряжения, чем для обеспечения стабильного питания приборов. Однако в литературе и интернет-порталах часто можно встретить названия типа «ШИМ-контроллер, на NE555» или «… на ардуино» – это не совсем верно по вышеуказанным причинам, они могут использоваться только для регулирования выходных параметров, но не для их стабилизации.
Аббревиатура «ШИМ» расшифровывается, как широтно-импульсная модуляция – это один из методов модуляции сигнала не за счёт величины выходного напряжения, а именно за счёт изменения ширины импульсов. В результате формируется моделируемый сигнал за счёт интегрирования импульсов с помощью C- или LC-цепей, другими словами – за счёт сглаживания.
Вывод: ШИМ-контроллер – устройство, которое управляет ШИМ-сигналом.
Основные характеристики
Для ШИМ-сигнала можно выделить две основных характеристики:
1. Частота импульсов – от этого зависит рабочая частота преобразователя. Типовыми являются частоты выше 20 кГц, фактически 40-100 кГц.
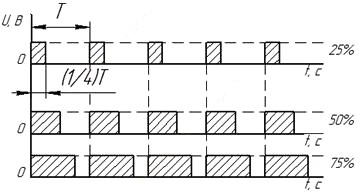
2. Коэффициент заполнения и скважность. Это две смежных величины характеризующие одно и то же. Коэффициент заполнения может обозначаться буквой S, а скважность D.
где T – это период сигнала,
Коэффициент заполнения – часть времени от периода, когда на выходе контроллера формируется управляющий сигнал, всегда меньше 1. Скважность всегда больше 1. При частоте 100 кГц период сигнала равен 10 мкс, а ключ открыт в течении 2.5 мкс, то коэффициент заполнения – 0.25, в процентах – 25%, а скважность равна 4.
Также важно учитывать внутреннюю конструкцию и предназначение по количеству управляемых ключей.
Отличия от линейных схем потери
Как уже было сказано, преимуществом перед линейными схемами у импульсных источников питания является высокий КПД (больше 80, а в настоящее время и 90%). Это обусловлено следующим:
Допустим сглаженное напряжение после диодного моста равно 15В, ток нагрузки 1А. Вам нужно получить стабилизированное питание напряжением 12В. Фактически линейный стабилизатор представляет собой сопротивление, которое изменяет свою величину в зависимости от величины входного напряжения для получения номинального выходного – с небольшими отклонениями (доли вольт) при изменениях входного (единицы и десятки вольт).
На резисторах, как известно, при протекании через них электрического тока выделяется тепловая энергия. На линейных стабилизаторах происходит такой же процесс. Выделенная мощность будет равна:
Так как в рассмотренном примере ток нагрузки 1А, входное напряжение 15В, а выходное – 12В, то рассчитаем потери и КПД линейного стабилизатора (КРЕНка или типа L7812):
Pпотерь=(15В-12В)*1А = 3В*1А = 3Вт
Тогда КПД равен:
Если же входное напряжение вырастит до 20В, например, то КПД снизится:
Основной особенностью ШИМ является то, что силовой элемент, пусть это будет MOSFET, либо открыт полностью, либо полностью закрыт и ток через него не протекает. Поэтому потери КПД обусловлены только потерями проводимости
И потерями переключения. Это тема для отдельной статьи, поэтому не будем останавливаться на этом вопросе. Также потери блока питания возникают в выпрямительных диодах (входных и выходных, если блок питания сетевой), а также на проводниках, пассивных элементах фильтра и прочем.
Общая структура
Рассмотрим общую структуру абстрактного ШИМ-контроллер. Я употребил слово "абстрактного" потому что, в общем, все они похожи, но их функционал все же может отличаться в определенных пределах, соответственно будет отличаться структура и выводы.
Внутри ШИМ-контроллера, как и в любой другой ИМС находится полупроводниковый кристалл, на котором расположена сложная схема. В состав контроллера входят следующие функциональные узлы:
1. Генератор импульсов.
2. Источник опорного напряжения. (ИОН)
3. Цепи для обработки сигнала обратной связи (ОС): усилитель ошибки, компаратор.
4. Генератор импульсов управляет встроенными транзисторами, которые предназначены для управления силовым ключом или ключами.
Количество силовых ключей, которыми может управлять ШИМ-контроллер, зависит от его предназначения. Простейшие обратноходовые преобразователи в своей схеме содержат 1 силовой ключ, полумостовые схемы (push-pull) – 2 ключа, мостовые – 4.
От типа ключа также зависит выбор ШИМ-контроллера. Для управления биполярным транзистором основным требованием является, чтобы выходной ток управления ШИМ-контроллера не был ниже, чем ток транзистора деленный на H21э, чтобы его включать и отключать достаточно просто подавать импульсы на базу. В этом случае подойдет большинство контроллеров.
В случае управления ключами с изолированным затвором (MOSFET, IGBT) есть определенные нюансы. Для быстрого отключения нужно разрядить емкость затвора. Для этого выходную цепь затвора выполняют из двух ключей – один из них соединен с источником питания с выводом ИМС и управляет затвором (включает транзистор), а второй установлен между выходом и землей, когда нужно отключить силовой транзистор – первый ключ закрывается, второй открывается, замыкая затвор на землю и разряжает его.
В некоторых ШИМ-контроллрах для маломощных блоков питания (до 50 Вт) силовые ключи встроенные и внешние не используются. Пример – 5l0830R
Если говорить обобщенно, то ШИМ-контроллер можно представить в виде компаратора, на один вход которого подан сигнал с цепи обратной связи (ОС), а на второй вход пилообразный изменяющийся сигнал. Когда пилообразный сигнал достигает и превышает по величине сигнал ОС, то на выходе компаратора возникает импульс.
При изменениях сигналов на входах ширина импульсов меняется. Допустим, что вы подключили мощный потребитель к блоку питания, и на его выходе напряжение просело, тогда напряжение ОС также упадет. Тогда в большей части периода будет наблюдаться превышение пилообразного сигнала над сигналом ОС, и ширина импульсов увеличится. Всё вышесказанное в определенной мере отражено на графиках.
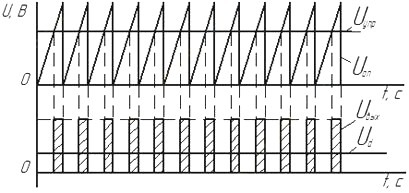
Рабочая частота генератора устанавливается с помощью частотозадающей RC-цепи.
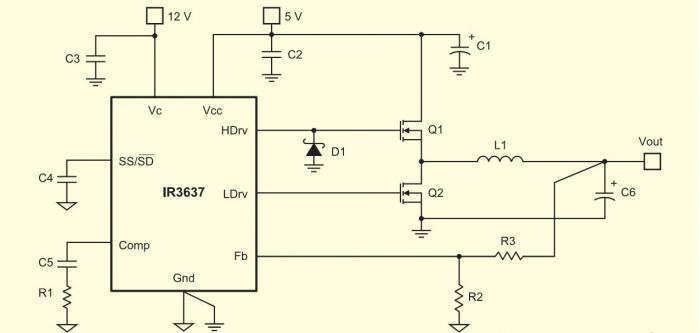
Функциональная схема ШИМ-контроллера на примере TL494, мы рассмотрим его позже подробнее. Назначение выводов и отдельных узлов описано в следующем подзаголовке.
Назначение выводов
ШИМ-контроллеры выпускаются в различных корпусах. Выводов у них может быть от трех до 16 и более. Соответственно от количества выводов, а вернее их назначения зависит гибкость использования контроллера. Например, в популярной микросхеме UC3843 – чаще всего 8 выводов, а в еще более культовой – TL494 – 16 или 24.
Поэтому рассмотрим типовые названия выводов и их назначение:
GND – общий вывод соединяется с минусом схемы или с землей.
Uc (Vc) – питание микросхемы.
Ucc (Vss, Vcc) – Вывод для контроля питания. Если питание проседает, то возникает вероятность того, что силовые ключи не будут полностью открываться, а из-за этого начнут греться и сгорят. Вывод нужен чтобы отключить контроллер в подобной ситуации.
OUT – как видно из название – это выход контроллера. Здесь выводятся управляющий ШИМ-сигнал для силовых ключей. Выше мы упомянули, что в преобразователях разных топологий имеют разное количество ключей. Название вывода может отличаться в зависимости от этого. Например, в контроллерах для полумостовых схем он может называться HO и LO для верхнего и нижнего ключа соответственно. При этом и выход может быть однотактный и двухтактный (с одним ключем и двумя) – для управления полевыми транзисторами (пояснение см. выше). Но и сам контроллер может быть для однотактной и двухтактной схемы – с одним и двумя выходными выводами соответственно. Это важно.
Vref – опорное напряжения, обычно соединяется с землей через небольшой конденсатор (единицы микрофарад).
ILIM – сигнал с датчика тока. Нужен для ограничения выходного тока. Соединяется с цепями обратной связи.
ILIMREF – на ней устанавливается напряжение срабатывания ножки ILIM
SS – формируется сигнал для мягкого старта контроллера. Предназначен для плавного выхода на номинальный режим. Между ней и общим проводом для обеспечения плавного пуска устанавливают конденсатор.
RtCt – выводы для подключения времязадающей RC-цепи, которая определяет частоту ШИМ-сигнала.
CLOCK – тактовые импульсы для синхронизации нескольких ШИМ-контроллеров между собой тогда RC-цепь подключается только к ведущему контроллеру, а RT ведомых с Vref, CT ведомых соединяюся с общим.
RAMP – это ввод сравнения. На него подают пилообразное напряжение, например с вывода Ct, Когда оно превышает значение напряжение на выходе усиления ошибки, то на OUT появляется отключающий импульс – основа для ШИМ-регулирования.
INV и NONINV – это инвертирующий и неинвертирующий входы компаратора, на котором построен усилитель ошибки. Простыми словами: чем больше напряжении на INV – тем длинее выходные импульсы и наоборот. К нему подключается сигнал с делителя напряжения в цепи обратной связи с выхода. Тогда неинвертирующий вход NONINV подключают к общему проводу – GND.
EAOUT или Error Amplifier Output рус. Выход усилителя ошибки. Не смотря на то, что есть входы усилителя ошибки и с их помощью, в принципе можно регулировать выходные параметры, но контроллер довольно медленно на это реагирует. В результате медленной реакции может возникнуть возбуждение схемы, и она выйдет из строя. Поэтому с этого вывода через частотозависимые цепи подают сигналы на INV. Это еще называется частотной коррекцией усилителя ошибки.
Примеры реальных устройств
Для закрепления информации давайте рассмотрим несколько примеров типовых ШИМ-контроллеров и их схем включения. Мы будем делать это на примере двух микросхем:
TL494 (её аналоги: KA7500B, КР1114ЕУ4, Sharp IR3M02, UA494, Fujitsu MB3759);
Они активно используются в блоках питания для компьютеров. Кстати, эти блоки питания обладают немалой мощностью (100 Вт и больше по 12В шине). Часто используются в качестве донора для переделки под лабораторный блок питания или универсальное мощное зарядное устройство, например для автомобильных аккумуляторов.
TL494 – обзор
Начнем с 494-й микросхемы. Её технические характеристики:
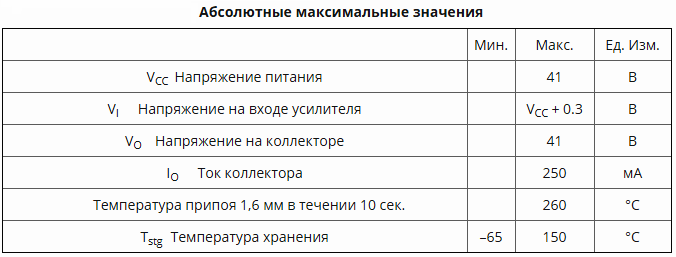
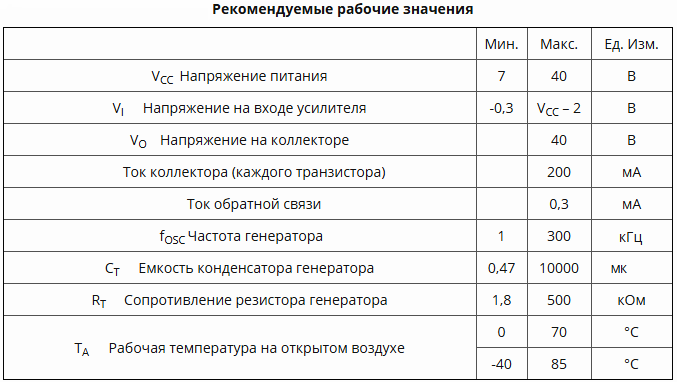
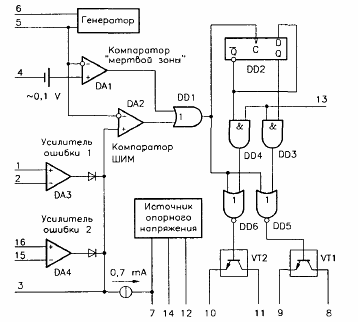
В этом конкретном примере можно видеть большинство описанных выше выводов:
1. Неинвертирующий вход первого компаратора ошибки
2. Инвертирующий вход первого компаратора ошибки
3. Вход обратной связи
4. Вход регулировки мертвого времени
5. Вывод для подключения внешнего времязадающего конденсатора
6. Вывод для подключения времязадающего резистора
7. Общий вывод микросхемы, минус питания
8. Вывод коллектора первого выходного транзистора
9. Вывод эмиттера первого выходного транзистора
10. Вывод эмиттера второго выходного транзистора
11. Вывод коллектора второго выходного транзистора
12. Вход подачи питающего напряжения
13. Вход выбора однотактного или же двухтактного режима работы микросхемы
14. Вывод встроенного источника опорного напряжения 5 вольт
15. Инвертирующий вход второго компаратора ошибки
16. Неинвертирующий вход второго компаратора ошибки
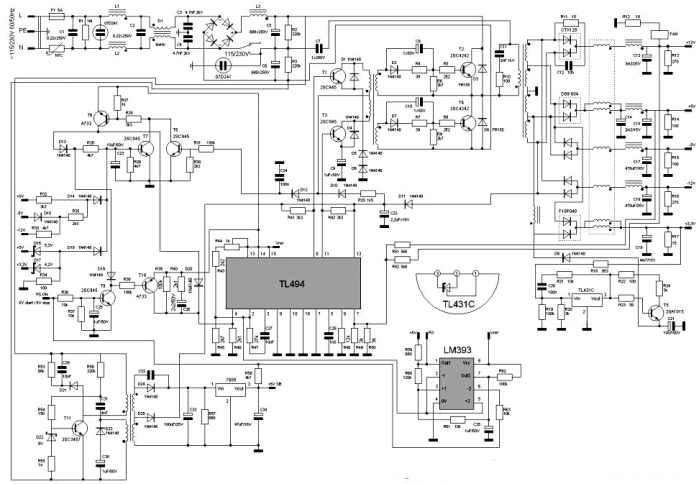
На рисунке ниже изображен пример компьютерного блока питания на этой микросхеме.
UC3843 – обзор
Другой популярной ШИМ является микросхема 3843 – на ней также строятся компьютерные и не только блоки питания. Её цоколевка расположена ниже, как вы можете наблюдать, у неё всего 8 выводов, но функции она выполняет те же, что и предыдущая ИМС.
Бывает UC3843 и в 14-ногом корпусе, но встречаются гораздо реже. Обратите внимание на маркировку – дополнительные выводы либо дублируются, либо незадействованы (NC).
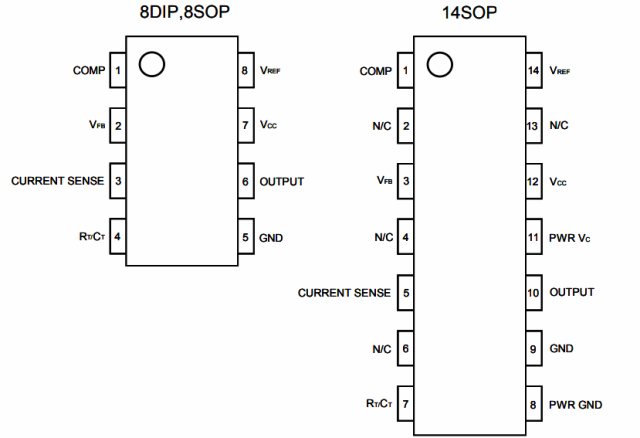
Расшифруем назначением выводов:
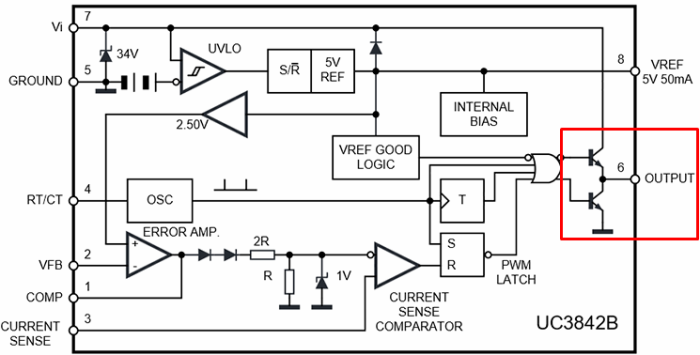
1. Вход компаратора (усилителя ошибки).
2. Вход напряжения обратной связи. Это напряжение сравнивается с опорным внутри ИМС.
3. Датчик тока. Подключается к резистору стоящему в между силовым транзистором и общим проводом. Нужен для защиты от перегрузок.
4. Времязадающая RC-цепь. С её помощью задаётся рабочая частота ИМС.
6. Выход. Управляющее напряжение. Подключается к затвору транзистора, здесь двухтактный выходной каскад для управления однотактным преобразователем (одним транзистором), что можно наблюдать на рисунке ниже.
7. Напряжение питания микросхемы.
8. Выход источника опорного напряжения (5В, 50 мА).
Её внутренняя структура.
Можно убедится, что во многом похожа и на другие ШИМ-контроллеры.
Простая схема сетевого источника питания на UC3842
ШИМ со встроенным силовым ключем
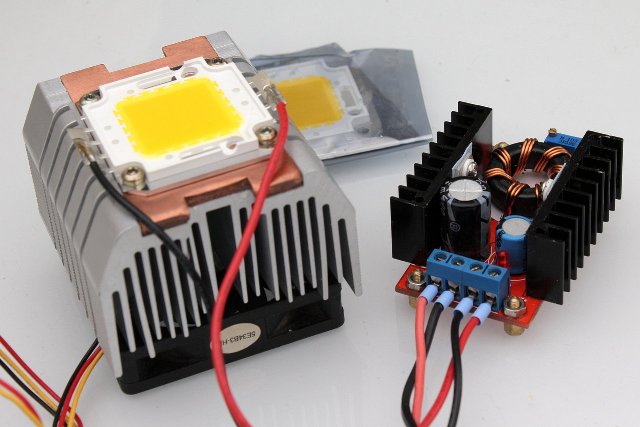
ШИМ-контроллеры со встроенным силовым ключем используются как в трансформаторных импульсных блоках питания, так и в бестрансформаторных DC-DC преобразователях понижающего (Buck), повышающего (Boost) и понижающее-повышающего (Buck-Boost) типов.
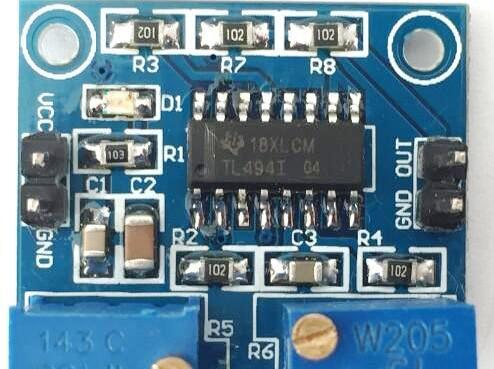
Пожалуй, одним из наиболее удачных примеров будет распространенная микросхема LM2596, на базе которого на рынке можно найти массу таких преобразователей, как изображен ниже.
Такая микросхема содержит в себе все вышеописанные технические решения, а также вместо выходного каскада на маломощных ключах в ней встроен силовой ключ, способный выдержать ток до 3А. Ниже изображена внутренняя структура такого преобразователя.
Можно убедиться, что в сущности особых отличий от рассмотренных в ней нет.
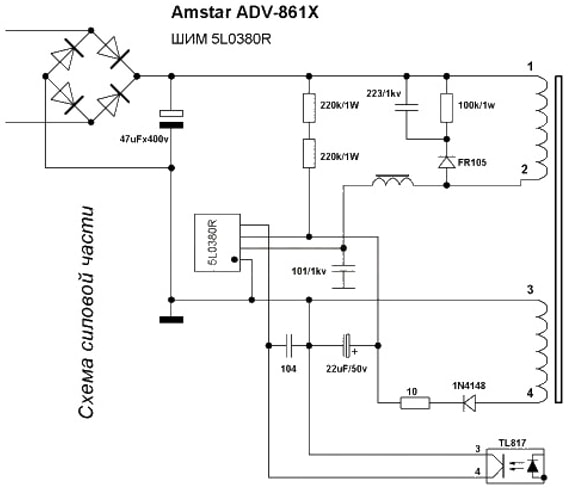
А вот пример трансформаторного блока питания для светодиодной ленты на подобном контроллере, как видите силового ключа нет, а только микросхема 5L0380R с четырьмя выводами. Отсюда следует, что в определенных задачах сложная схемотехника и гибкость TL494 просто не нужна. Это справедливо для маломощных блоков питания, где нет особых требований к шумам и помехам, а выходные пульсации можно погасить LC-фильтром. Это блок питания для светодиодных лент, ноутбуков, DVD-плееров и прочее.
Заключение
В начале статьи было сказано о том, что ШИМ-контроллер это устройство которое моделирует среднее значение напряжения за счет изменения ширина импульсов на основании сигнала с цепи обратной связи. Отмечу, что названия и классификация у каждого автора часто отличается, иногда ШИМ-контроллером называют простой ШИМ-регулятор напряжения, а описанное в этой статьей семейство электронных микросхем называют «Интегральная подсистема для импульсных стабилизированных преобразователей». От названия суть не меняется, но возникают споры и недопонимания.
Раньше для питания устройств использовали схему с понижающим (или повышающим, или многообмоточным) трансформатором, диодным мостом, фильтром для сглаживания пульсаций. Для стабилизации использовались линейные схемы на параметрических или интегральных стабилизаторах. Главным недостатком был низкий КПД и большой вес и габариты мощных блоков питания.
Во всех современных бытовых электроприборах используются импульсные блоки питания (ИБП, ИИП – одно и то же). В большинстве таких блоков питания в качестве основного управляющего элемента используют ШИМ-контроллер. В этой статье мы рассмотрим его устройство и назначение.
Определение и основные преимущества
ШИМ-контроллер – это устройство, которое содержит в себе ряд схемотехнических решений для управления силовыми ключами. При этом управление происходит на основании информации полученной по цепям обратной связи по току или напряжению – это нужно для стабилизации выходных параметров.
Иногда, ШИМ-контроллерами называются генераторы ШИМ-импульсов, но в них нет возможности подключить цепи обратной связи, и они подходят скорее для регуляторов напряжения, чем для обеспечения стабильного питания приборов. Однако в литературе и интернет-порталах часто можно встретить названия типа «ШИМ-контроллер, на NE555» или «… на ардуино» – это не совсем верно по вышеуказанным причинам, они могут использоваться только для регулирования выходных параметров, но не для их стабилизации.
Аббревиатура «ШИМ» расшифровывается, как широтно-импульсная модуляция – это один из методов модуляции сигнала не за счёт величины выходного напряжения, а именно за счёт изменения ширины импульсов. В результате формируется моделируемый сигнал за счёт интегрирования импульсов с помощью C- или LC-цепей, другими словами – за счёт сглаживания.
Вывод: ШИМ-контроллер – устройство, которое управляет ШИМ-сигналом.
Основные характеристики
Для ШИМ-сигнала можно выделить две основных характеристики:
1. Частота импульсов – от этого зависит рабочая частота преобразователя. Типовыми являются частоты выше 20 кГц, фактически 40-100 кГц.
2. Коэффициент заполнения и скважность. Это две смежных величины характеризующие одно и то же. Коэффициент заполнения может обозначаться буквой S, а скважность D.
где T – это период сигнала,
Коэффициент заполнения – часть времени от периода, когда на выходе контроллера формируется управляющий сигнал, всегда меньше 1. Скважность всегда больше 1. При частоте 100 кГц период сигнала равен 10 мкс, а ключ открыт в течении 2.5 мкс, то коэффициент заполнения – 0.25, в процентах – 25%, а скважность равна 4.
Также важно учитывать внутреннюю конструкцию и предназначение по количеству управляемых ключей.
Отличия от линейных схем потери
Как уже было сказано, преимуществом перед линейными схемами у импульсных источников питания является высокий КПД (больше 80, а в настоящее время и 90%). Это обусловлено следующим:
Допустим сглаженное напряжение после диодного моста равно 15В, ток нагрузки 1А. Вам нужно получить стабилизированное питание напряжением 12В. Фактически линейный стабилизатор представляет собой сопротивление, которое изменяет свою величину в зависимости от величины входного напряжения для получения номинального выходного – с небольшими отклонениями (доли вольт) при изменениях входного (единицы и десятки вольт).
На резисторах, как известно, при протекании через них электрического тока выделяется тепловая энергия. На линейных стабилизаторах происходит такой же процесс. Выделенная мощность будет равна:
Так как в рассмотренном примере ток нагрузки 1А, входное напряжение 15В, а выходное – 12В, то рассчитаем потери и КПД линейного стабилизатора (КРЕНка или типа L7812):
Pпотерь=(15В-12В)*1А = 3В*1А = 3Вт
Тогда КПД равен:
Если же входное напряжение вырастит до 20В, например, то КПД снизится:
Основной особенностью ШИМ является то, что силовой элемент, пусть это будет MOSFET, либо открыт полностью, либо полностью закрыт и ток через него не протекает. Поэтому потери КПД обусловлены только потерями проводимости
И потерями переключения. Это тема для отдельной статьи, поэтому не будем останавливаться на этом вопросе. Также потери блока питания возникают в выпрямительных диодах (входных и выходных, если блок питания сетевой), а также на проводниках, пассивных элементах фильтра и прочем.
Общая структура
Рассмотрим общую структуру абстрактного ШИМ-контроллер. Я употребил слово "абстрактного" потому что, в общем, все они похожи, но их функционал все же может отличаться в определенных пределах, соответственно будет отличаться структура и выводы.
Внутри ШИМ-контроллера, как и в любой другой ИМС находится полупроводниковый кристалл, на котором расположена сложная схема. В состав контроллера входят следующие функциональные узлы:
1. Генератор импульсов.
2. Источник опорного напряжения. (ИОН)
3. Цепи для обработки сигнала обратной связи (ОС): усилитель ошибки, компаратор.
4. Генератор импульсов управляет встроенными транзисторами, которые предназначены для управления силовым ключом или ключами.
Количество силовых ключей, которыми может управлять ШИМ-контроллер, зависит от его предназначения. Простейшие обратноходовые преобразователи в своей схеме содержат 1 силовой ключ, полумостовые схемы (push-pull) – 2 ключа, мостовые – 4.
От типа ключа также зависит выбор ШИМ-контроллера. Для управления биполярным транзистором основным требованием является, чтобы выходной ток управления ШИМ-контроллера не был ниже, чем ток транзистора деленный на H21э, чтобы его включать и отключать достаточно просто подавать импульсы на базу. В этом случае подойдет большинство контроллеров.
В случае управления ключами с изолированным затвором (MOSFET, IGBT) есть определенные нюансы. Для быстрого отключения нужно разрядить емкость затвора. Для этого выходную цепь затвора выполняют из двух ключей – один из них соединен с источником питания с выводом ИМС и управляет затвором (включает транзистор), а второй установлен между выходом и землей, когда нужно отключить силовой транзистор – первый ключ закрывается, второй открывается, замыкая затвор на землю и разряжает его.
В некоторых ШИМ-контроллрах для маломощных блоков питания (до 50 Вт) силовые ключи встроенные и внешние не используются. Пример – 5l0830R
Если говорить обобщенно, то ШИМ-контроллер можно представить в виде компаратора, на один вход которого подан сигнал с цепи обратной связи (ОС), а на второй вход пилообразный изменяющийся сигнал. Когда пилообразный сигнал достигает и превышает по величине сигнал ОС, то на выходе компаратора возникает импульс.
При изменениях сигналов на входах ширина импульсов меняется. Допустим, что вы подключили мощный потребитель к блоку питания, и на его выходе напряжение просело, тогда напряжение ОС также упадет. Тогда в большей части периода будет наблюдаться превышение пилообразного сигнала над сигналом ОС, и ширина импульсов увеличится. Всё вышесказанное в определенной мере отражено на графиках.
Рабочая частота генератора устанавливается с помощью частотозадающей RC-цепи.
Функциональная схема ШИМ-контроллера на примере TL494, мы рассмотрим его позже подробнее. Назначение выводов и отдельных узлов описано в следующем подзаголовке.
Назначение выводов
ШИМ-контроллеры выпускаются в различных корпусах. Выводов у них может быть от трех до 16 и более. Соответственно от количества выводов, а вернее их назначения зависит гибкость использования контроллера. Например, в популярной микросхеме UC3843 – чаще всего 8 выводов, а в еще более культовой – TL494 – 16 или 24.
Поэтому рассмотрим типовые названия выводов и их назначение:
GND – общий вывод соединяется с минусом схемы или с землей.
Uc (Vc) – питание микросхемы.
Ucc (Vss, Vcc) – Вывод для контроля питания. Если питание проседает, то возникает вероятность того, что силовые ключи не будут полностью открываться, а из-за этого начнут греться и сгорят. Вывод нужен чтобы отключить контроллер в подобной ситуации.
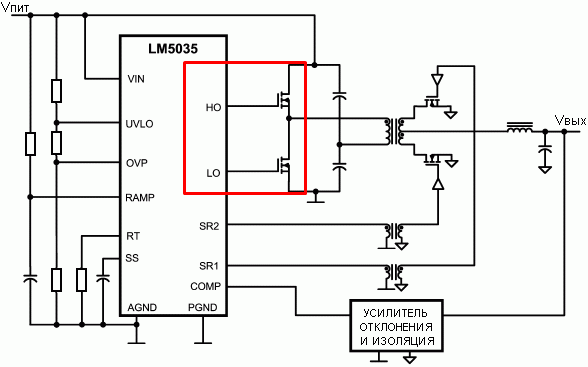
OUT – как видно из название – это выход контроллера. Здесь выводятся управляющий ШИМ-сигнал для силовых ключей. Выше мы упомянули, что в преобразователях разных топологий имеют разное количество ключей. Название вывода может отличаться в зависимости от этого. Например, в контроллерах для полумостовых схем он может называться HO и LO для верхнего и нижнего ключа соответственно. При этом и выход может быть однотактный и двухтактный (с одним ключем и двумя) – для управления полевыми транзисторами (пояснение см. выше). Но и сам контроллер может быть для однотактной и двухтактной схемы – с одним и двумя выходными выводами соответственно. Это важно.
Vref – опорное напряжения, обычно соединяется с землей через небольшой конденсатор (единицы микрофарад).
ILIM – сигнал с датчика тока. Нужен для ограничения выходного тока. Соединяется с цепями обратной связи.
ILIMREF – на ней устанавливается напряжение срабатывания ножки ILIM
SS – формируется сигнал для мягкого старта контроллера. Предназначен для плавного выхода на номинальный режим. Между ней и общим проводом для обеспечения плавного пуска устанавливают конденсатор.
RtCt – выводы для подключения времязадающей RC-цепи, которая определяет частоту ШИМ-сигнала.
CLOCK – тактовые импульсы для синхронизации нескольких ШИМ-контроллеров между собой тогда RC-цепь подключается только к ведущему контроллеру, а RT ведомых с Vref, CT ведомых соединяюся с общим.
RAMP – это ввод сравнения. На него подают пилообразное напряжение, например с вывода Ct, Когда оно превышает значение напряжение на выходе усиления ошибки, то на OUT появляется отключающий импульс – основа для ШИМ-регулирования.
INV и NONINV – это инвертирующий и неинвертирующий входы компаратора, на котором построен усилитель ошибки. Простыми словами: чем больше напряжении на INV – тем длинее выходные импульсы и наоборот. К нему подключается сигнал с делителя напряжения в цепи обратной связи с выхода. Тогда неинвертирующий вход NONINV подключают к общему проводу – GND.
EAOUT или Error Amplifier Output рус. Выход усилителя ошибки. Не смотря на то, что есть входы усилителя ошибки и с их помощью, в принципе можно регулировать выходные параметры, но контроллер довольно медленно на это реагирует. В результате медленной реакции может возникнуть возбуждение схемы, и она выйдет из строя. Поэтому с этого вывода через частотозависимые цепи подают сигналы на INV. Это еще называется частотной коррекцией усилителя ошибки.
Примеры реальных устройств
Для закрепления информации давайте рассмотрим несколько примеров типовых ШИМ-контроллеров и их схем включения. Мы будем делать это на примере двух микросхем:
TL494 (её аналоги: KA7500B, КР1114ЕУ4, Sharp IR3M02, UA494, Fujitsu MB3759);
Они активно используются в блоках питания для компьютеров. Кстати, эти блоки питания обладают немалой мощностью (100 Вт и больше по 12В шине). Часто используются в качестве донора для переделки под лабораторный блок питания или универсальное мощное зарядное устройство, например для автомобильных аккумуляторов.
TL494 – обзор
Начнем с 494-й микросхемы. Её технические характеристики:
В этом конкретном примере можно видеть большинство описанных выше выводов:
1. Неинвертирующий вход первого компаратора ошибки
2. Инвертирующий вход первого компаратора ошибки
3. Вход обратной связи
4. Вход регулировки мертвого времени
5. Вывод для подключения внешнего времязадающего конденсатора
6. Вывод для подключения времязадающего резистора
7. Общий вывод микросхемы, минус питания
8. Вывод коллектора первого выходного транзистора
9. Вывод эмиттера первого выходного транзистора
10. Вывод эмиттера второго выходного транзистора
11. Вывод коллектора второго выходного транзистора
12. Вход подачи питающего напряжения
13. Вход выбора однотактного или же двухтактного режима работы микросхемы
14. Вывод встроенного источника опорного напряжения 5 вольт
15. Инвертирующий вход второго компаратора ошибки
16. Неинвертирующий вход второго компаратора ошибки
На рисунке ниже изображен пример компьютерного блока питания на этой микросхеме.
UC3843 – обзор
Другой популярной ШИМ является микросхема 3843 – на ней также строятся компьютерные и не только блоки питания. Её цоколевка расположена ниже, как вы можете наблюдать, у неё всего 8 выводов, но функции она выполняет те же, что и предыдущая ИМС.
Бывает UC3843 и в 14-ногом корпусе, но встречаются гораздо реже. Обратите внимание на маркировку – дополнительные выводы либо дублируются, либо незадействованы (NC).
Расшифруем назначением выводов:
1. Вход компаратора (усилителя ошибки).
2. Вход напряжения обратной связи. Это напряжение сравнивается с опорным внутри ИМС.
3. Датчик тока. Подключается к резистору стоящему в между силовым транзистором и общим проводом. Нужен для защиты от перегрузок.
4. Времязадающая RC-цепь. С её помощью задаётся рабочая частота ИМС.
6. Выход. Управляющее напряжение. Подключается к затвору транзистора, здесь двухтактный выходной каскад для управления однотактным преобразователем (одним транзистором), что можно наблюдать на рисунке ниже.
7. Напряжение питания микросхемы.
8. Выход источника опорного напряжения (5В, 50 мА).
Её внутренняя структура.
Можно убедится, что во многом похожа и на другие ШИМ-контроллеры.
Простая схема сетевого источника питания на UC3842
ШИМ со встроенным силовым ключем
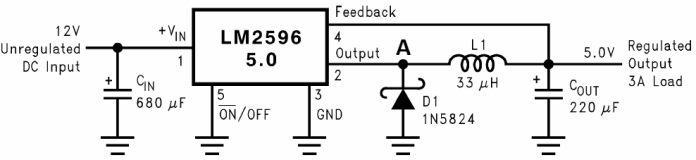
ШИМ-контроллеры со встроенным силовым ключем используются как в трансформаторных импульсных блоках питания, так и в бестрансформаторных DC-DC преобразователях понижающего (Buck), повышающего (Boost) и понижающее-повышающего (Buck-Boost) типов.
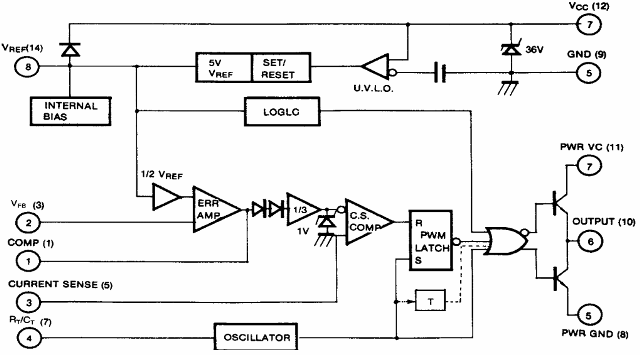
Пожалуй, одним из наиболее удачных примеров будет распространенная микросхема LM2596, на базе которого на рынке можно найти массу таких преобразователей, как изображен ниже.
Такая микросхема содержит в себе все вышеописанные технические решения, а также вместо выходного каскада на маломощных ключах в ней встроен силовой ключ, способный выдержать ток до 3А. Ниже изображена внутренняя структура такого преобразователя.
Можно убедиться, что в сущности особых отличий от рассмотренных в ней нет.
А вот пример трансформаторного блока питания для светодиодной ленты на подобном контроллере, как видите силового ключа нет, а только микросхема 5L0380R с четырьмя выводами. Отсюда следует, что в определенных задачах сложная схемотехника и гибкость TL494 просто не нужна. Это справедливо для маломощных блоков питания, где нет особых требований к шумам и помехам, а выходные пульсации можно погасить LC-фильтром. Это блок питания для светодиодных лент, ноутбуков, DVD-плееров и прочее.
Заключение
В начале статьи было сказано о том, что ШИМ-контроллер это устройство которое моделирует среднее значение напряжения за счет изменения ширина импульсов на основании сигнала с цепи обратной связи. Отмечу, что названия и классификация у каждого автора часто отличается, иногда ШИМ-контроллером называют простой ШИМ-регулятор напряжения, а описанное в этой статьей семейство электронных микросхем называют «Интегральная подсистема для импульсных стабилизированных преобразователей». От названия суть не меняется, но возникают споры и недопонимания.