Содержание
Октябрь 14, 2017
Нам понадобится:
Для изготовления корпуса для балансира я взял картон. Картон был довольно тонкий и я склеивал несколько листов, для увеличения прочности конструкции.

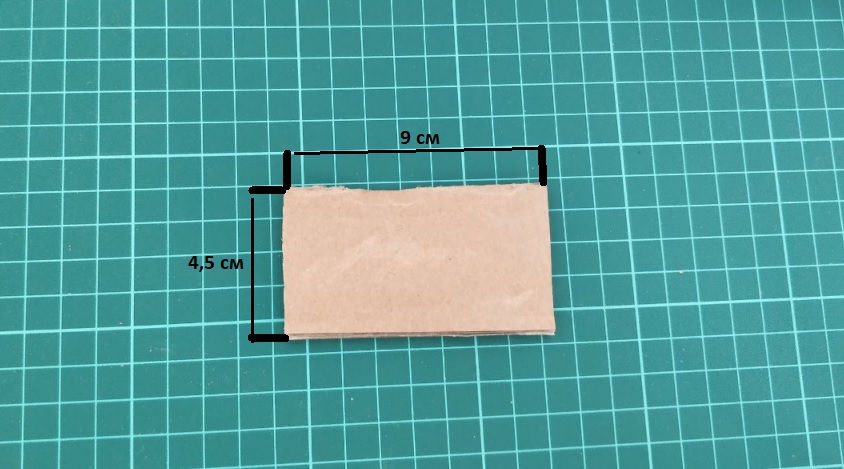
Размер боковин балансира указан на фото:

Таких деталей должно быть две, но с учетом того что картон тонкий, я их сделал 4 и склеил между собой термопистолетом.
С вертикальными частями разобрались, теперь нужно сделать 3 горизонтальных. Я их склеивал тоже между собой, поэтому сделал вот таких частей 6 шт.:
После склейки должна получиться лесенка. Все детали я склеивал между собой термоклеем, картон он очень хорошо склеивает.
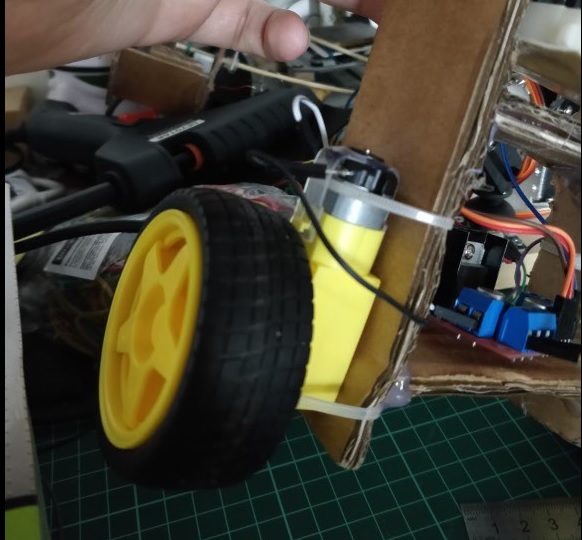
Моторредукторы я крепил на стяжки к боковинам получившейся “лесенки”
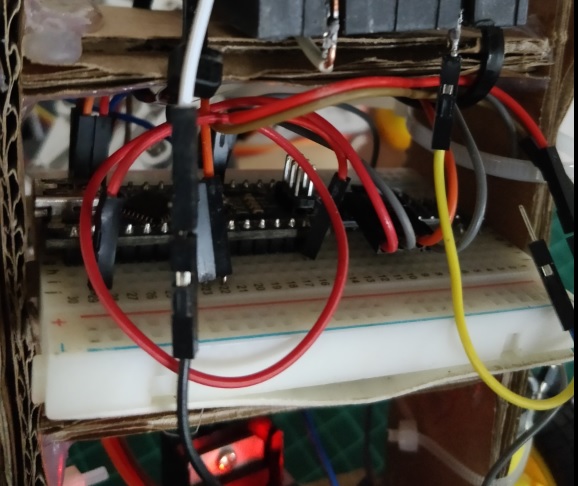
Драйвер двигателей, я разместил на самую нижнюю полку получившейся конструкции.
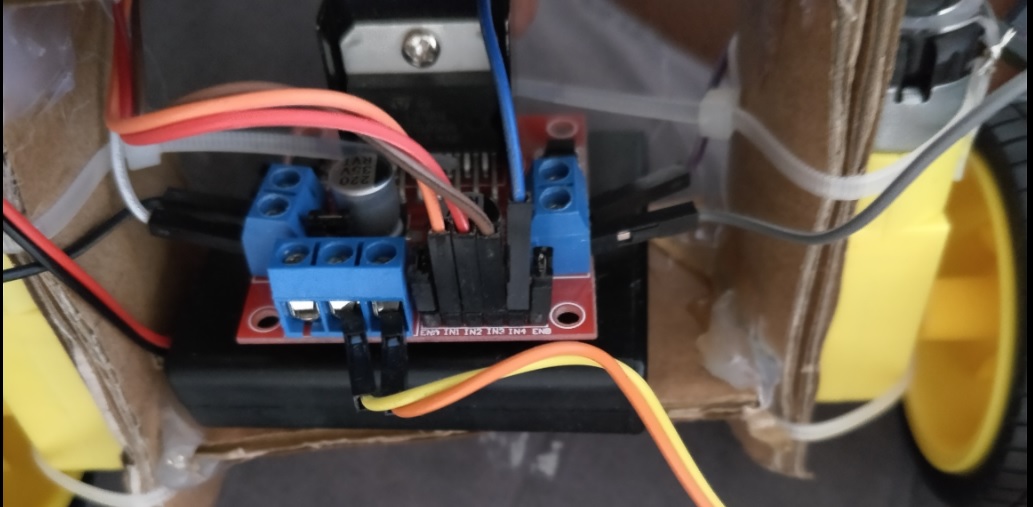
При подключении самих моторов к драйверу, важно подобрать правильную полярность, чтоб моторы крутились именно в ту сторону, в которую нужно чтоб они крутились для удерживания ровновесия.
Наши “мозги” Ардуино и гироском Mpu 6050 я установил на среднюю полку, чтоб было не сложно дотянуться и до драйвера двигателей и до аккумуляторов.
ВАЖНО: Гироскоп нужно расположить ровно в плоскости, иначе роботу будет тяжело держать равновесие.
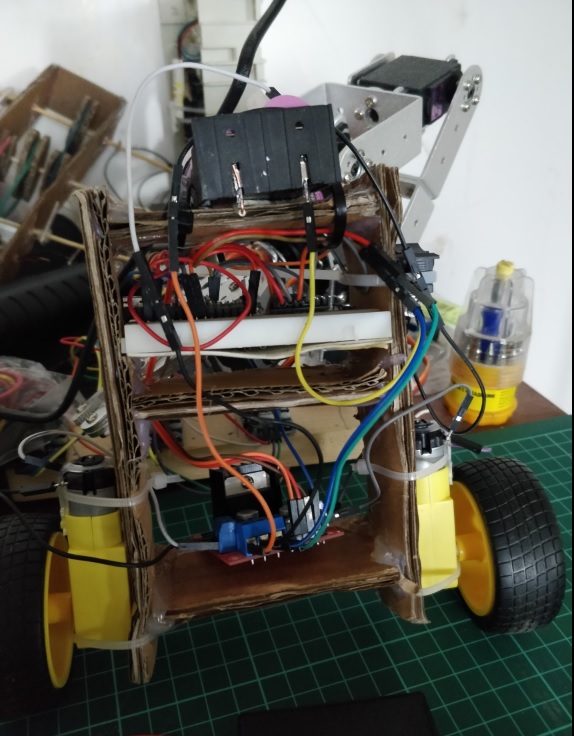
Ну и сами аккумуляторы прикрепил на стяжки в самом верху конструкции.
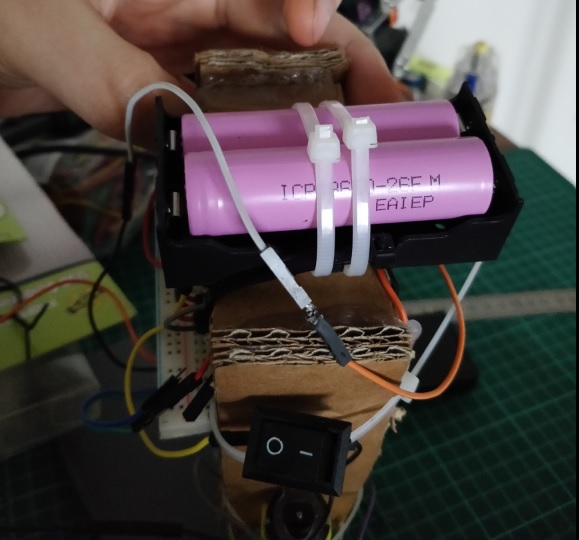
После размещения всех элементов и подключения их друг с другом проводами, Робот выглядит вот таким вот образом.
После того как мы разобрались с конструкцией робота, давайте перейдем к электронной части, а именно к схеме подключения элементов.
Ну и собственно сам скетч:
Для корректной работы скетча нам еще понадобятся две библиотеки kalman и PID_v1
Ну и собственно демонстрация работы:
Давайте поговорим о том как можно использовать Ардуино для создания робота, который балансирует как Сигвей.

Сигвей от англ. Segway – двухколесное средство передвижения стоя, оснащенное электроприводом. Еще их называют гироскутерами или электрическими самокатами.
Вы когда-нибудь задумывались, как работает Сигвей? В этом уроке мы постараемся показать вам, как сделать робота Ардуино, который уравновешивает себя точно так же, как Segway.
Как работает балансировка?
Чтобы сбалансировать робота, двигатели должны противодействовать падению робота. Это действие требует обратной связи и корректирующих элементов. Элемент обратной связи – гироскоп-акселерометр MPU6050, который обеспечивает как ускорение, так и вращение во всех трех осях (основы MP26050 I2C). Ардуино использует это, чтобы знать текущую ориентацию робота. Корректирующим элементом является комбинация двигателя и колеса.

В итоге должен получиться примерно такой друг:
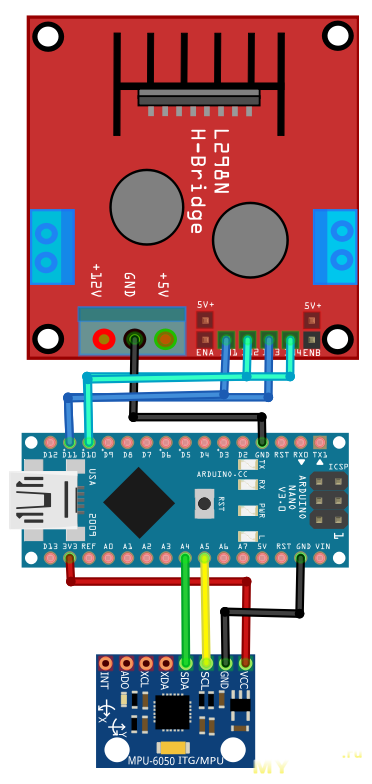
Схема робота

Сначала подключите MPU6050 к Ардуино и проверьте соединение, используя коды в этом учебном руководстве по интерфейсу IMU. Если данные теперь отображаются на последовательном мониторе, вы молодец!
Продолжайте подключать остальные компоненты, как показано выше. Модуль L298N может обеспечить +5В, необходимый для Ардуино, если его входное напряжение составляет +7В или выше. Тем не менее, мы выбрали отдельные источники питания для двигателя и схемы.
Создание робота
Корпус робота изготовлен в основном из акрилового пластика с двумя редукторными двигателями постоянного тока:

Основная печатная плата, состоящая из Arduino Nano и MPU6050:

Модуль драйвера двигателя L298N:

Мотор редуктора постоянного тока с колесом:

Самобалансирующийся робот по существу является перевернутым маятником. Он может быть лучше сбалансирован, если центр массы выше относительно колесных осей. Высший центр масс означает более высокий момент инерции массы, что соответствует более низкому угловому ускорению (более медленное падение). Вот почему мы положили батарейный блок на верх. Однако высота робота была выбрана исходя из наличия материалов 🙂

Завершенный вариант самостоятельно балансирующего робота можно посмотреть на рисунке выше. В верхней части находятся шесть Ni-Cd-батарей для питания печатной платы. В промежутках между моторами используется 9-вольтовая батарея для драйвера двигателя.
Теория
В теории управления, удерживая некоторую переменную (в данном случае позицию робота), требуется специальный контроллер, называемый ПИД (пропорциональная интегральная производная). Каждый из этих параметров имеет «прирост», обычно называемый Kp, Ki и Kd. PID обеспечивает коррекцию между желаемым значением (или входом) и фактическим значением (или выходом). Разница между входом и выходом называется «ошибкой».
ПИД-регулятор уменьшает погрешность до наименьшего возможного значения, постоянно регулируя выход. В нашем самобалансирующем роботе Arduino вход (который является желаемым наклоном в градусах) устанавливается программным обеспечением. MPU6050 считывает текущий наклон робота и подает его на алгоритм PID, который выполняет вычисления для управления двигателем и удерживает робота в вертикальном положении.
PID требует, чтобы значения Kp, Ki и Kd были настроены на оптимальные значения. Инженеры используют программное обеспечение, такое как MATLAB, для автоматического вычисления этих значений. К сожалению, мы не можем использовать MATLAB в нашем случае, потому что это еще больше усложнит проект. Вместо этого мы будем настраивать значения PID. Вот как это сделать:
- Сделайте Kp, Ki и Kd равными нулю.
- Отрегулируйте Kp. Слишком маленький Kp заставит робота упасть, потому что исправления недостаточно. Слишком много Kp заставляет робота идти дико вперед и назад. Хороший Kp сделает так, что робот будет совсем немного отклоняться назад и вперед (или немного осциллирует).
- Как только Kp установлен, отрегулируйте Kd. Хорошее значение Kd уменьшит колебания, пока робот не станет почти устойчивым. Кроме того, правильное Kd будет удерживать робота, даже если его толькать.
- Наконец, установите Ki. При включении робот будет колебаться, даже если Kp и Kd установлены, но будет стабилизироваться во времени. Правильное значение Ki сократит время, необходимое для стабилизации робота.
Поведение робота можно посмотреть ниже на видео:
Код Ардуино самобалансирующего робота
Нам понадобилось четыре внешних библиотеки, для создания нашего робота. Библиотека PID упрощает вычисление значений P, I и D. Библиотека LMotorController используется для управления двумя двигателями с модулем L298N. Библиотека I2Cdev и библиотека MPU6050_6_Axis_MotionApps20 предназначены для чтения данных с MPU6050. Вы можете загрузить код, включая библиотеки в этом репозитории.
Значения Kp, Ki, Kd могут работать или не работать. Если они этого не делают, выполните шаги, описанные выше. Обратите внимание, что наклона в коде установлен на 173 градуса. Вы можете изменить это значение, если хотите, но обратите внимание, что это угол наклона, которым должен поддерживаться роботом. Кроме того, если ваши двигатели слишком быстры, вы можете отрегулировать значения motorSpeedFactorLeft и motorSpeedFactorRight.
На этом пока всё. До встречи.
Опубликовал: Константин Александров / 17.04.2018
Давайте поговорим о том как можно использовать Ардуино для создания робота, который балансирует как Сигвей.
Сигвей от англ. Segway – двухколесное средство передвижения стоя, оснащенное электроприводом. Еще их называют гироскутерами или электрическими самокатами.
Вы когда-нибудь задумывались, как работает Сигвей? В этом уроке мы постараемся показать вам, как сделать робота Ардуино, который уравновешивает себя точно так же, как Segway.
Как работает балансировка?
Чтобы сбалансировать робота, двигатели должны противодействовать падению робота. Это действие требует обратной связи и корректирующих элементов. Элемент обратной связи – гироскоп-акселерометр MPU6050, который обеспечивает как ускорение, так и вращение во всех трех осях (основы MP26050 I2C). Ардуино использует это, чтобы знать текущую ориентацию робота. Корректирующим элементом является комбинация двигателя и колеса.
В итоге должен получиться примерно такой друг:
Схема робота
Сначала подключите MPU6050 к Ардуино и проверьте соединение, используя коды в этом учебном руководстве по интерфейсу IMU. Если данные теперь отображаются на последовательном мониторе, вы молодец!
Продолжайте подключать остальные компоненты, как показано выше. Модуль L298N может обеспечить +5В, необходимый для Ардуино, если его входное напряжение составляет +7В или выше. Тем не менее, мы выбрали отдельные источники питания для двигателя и схемы.
Создание робота
Корпус робота изготовлен в основном из акрилового пластика с двумя редукторными двигателями постоянного тока:
Основная печатная плата, состоящая из Arduino Nano и MPU6050:
Модуль драйвера двигателя L298N:
Мотор редуктора постоянного тока с колесом:
Самобалансирующийся робот по существу является перевернутым маятником. Он может быть лучше сбалансирован, если центр массы выше относительно колесных осей. Высший центр масс означает более высокий момент инерции массы, что соответствует более низкому угловому ускорению (более медленное падение). Вот почему мы положили батарейный блок на верх. Однако высота робота была выбрана исходя из наличия материалов 🙂
Завершенный вариант самостоятельно балансирующего робота можно посмотреть на рисунке выше. В верхней части находятся шесть Ni-Cd-батарей для питания печатной платы. В промежутках между моторами используется 9-вольтовая батарея для драйвера двигателя.
Теория
В теории управления, удерживая некоторую переменную (в данном случае позицию робота), требуется специальный контроллер, называемый ПИД (пропорциональная интегральная производная). Каждый из этих параметров имеет «прирост», обычно называемый Kp, Ki и Kd. PID обеспечивает коррекцию между желаемым значением (или входом) и фактическим значением (или выходом). Разница между входом и выходом называется «ошибкой».
ПИД-регулятор уменьшает погрешность до наименьшего возможного значения, постоянно регулируя выход. В нашем самобалансирующем роботе Arduino вход (который является желаемым наклоном в градусах) устанавливается программным обеспечением. MPU6050 считывает текущий наклон робота и подает его на алгоритм PID, который выполняет вычисления для управления двигателем и удерживает робота в вертикальном положении.
PID требует, чтобы значения Kp, Ki и Kd были настроены на оптимальные значения. Инженеры используют программное обеспечение, такое как MATLAB, для автоматического вычисления этих значений. К сожалению, мы не можем использовать MATLAB в нашем случае, потому что это еще больше усложнит проект. Вместо этого мы будем настраивать значения PID. Вот как это сделать:
- Сделайте Kp, Ki и Kd равными нулю.
- Отрегулируйте Kp. Слишком маленький Kp заставит робота упасть, потому что исправления недостаточно. Слишком много Kp заставляет робота идти дико вперед и назад. Хороший Kp сделает так, что робот будет совсем немного отклоняться назад и вперед (или немного осциллирует).
- Как только Kp установлен, отрегулируйте Kd. Хорошее значение Kd уменьшит колебания, пока робот не станет почти устойчивым. Кроме того, правильное Kd будет удерживать робота, даже если его толькать.
- Наконец, установите Ki. При включении робот будет колебаться, даже если Kp и Kd установлены, но будет стабилизироваться во времени. Правильное значение Ki сократит время, необходимое для стабилизации робота.
Поведение робота можно посмотреть ниже на видео:
Код Ардуино самобалансирующего робота
Нам понадобилось четыре внешних библиотеки, для создания нашего робота. Библиотека PID упрощает вычисление значений P, I и D. Библиотека LMotorController используется для управления двумя двигателями с модулем L298N. Библиотека I2Cdev и библиотека MPU6050_6_Axis_MotionApps20 предназначены для чтения данных с MPU6050. Вы можете загрузить код, включая библиотеки в этом репозитории.
Значения Kp, Ki, Kd могут работать или не работать. Если они этого не делают, выполните шаги, описанные выше. Обратите внимание, что наклона в коде установлен на 173 градуса. Вы можете изменить это значение, если хотите, но обратите внимание, что это угол наклона, которым должен поддерживаться роботом. Кроме того, если ваши двигатели слишком быстры, вы можете отрегулировать значения motorSpeedFactorLeft и motorSpeedFactorRight.
На этом пока всё. До встречи.
Опубликовал: Константин Александров / 17.04.2018